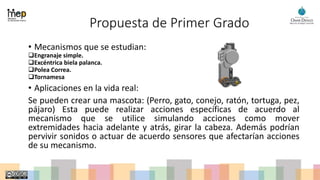
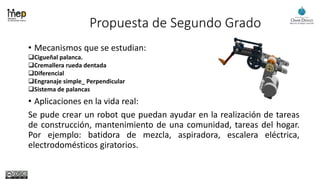
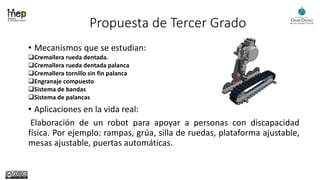
Este documento presenta propuestas educativas de robótica para diferentes grados escolares que incluyen el estudio de varios mecanismos y sus aplicaciones. Cada propuesta describe los mecanismos abordados, como engranajes, poleas, cremalleras y otros, y sugiere cómo podrían usarse para crear robots o juegos mecánicos que simulen tareas de la vida real. El autor también reflexiona sobre los logros de diseñar estas estructuras mecánicas y las áreas de oportunidad para mejorar el proceso en el futuro.