Descargar para leer sin conexión




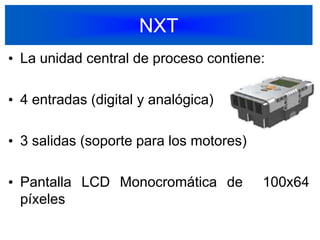
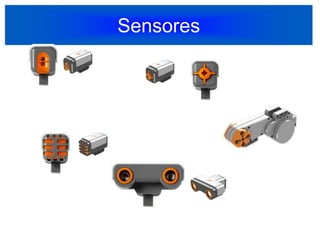

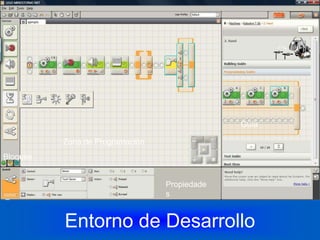
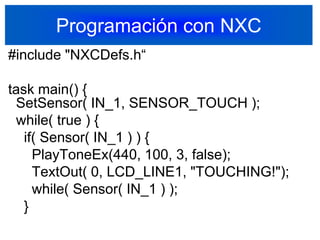




Este documento describe la robótica y los robots Lego Mindstorms NXT. Explica qué es un robot, sus características, componentes y cómo funcionan. También cubre la programación del robot NXT usando bloques y otros lenguajes como NXC.




















































