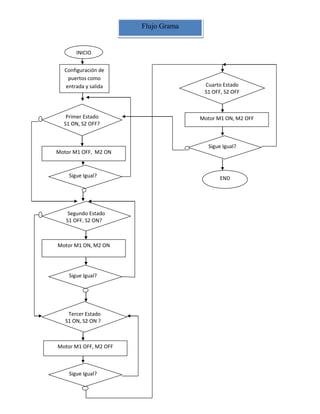
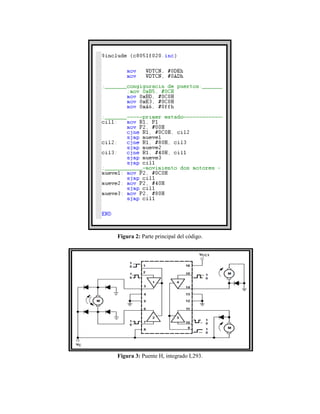
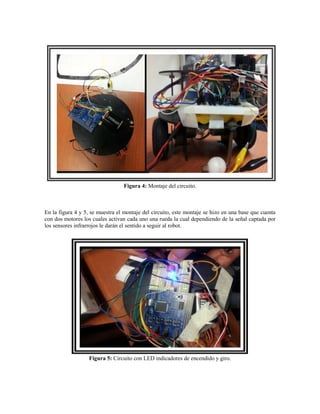
Se diseñó y construyó un circuito lógico para un seguidor de línea controlado por un microcontrolador 8051. El sistema de control utiliza programación estructurada y recursos mínimos. El circuito incluye puentes H para controlar dos motores DC mediante señales del microcontrolador, dependiendo del estado detectado por sensores infrarrojos. El montaje final incluye la base con motores y circuito con LEDs indicadores.