Descargar para leer sin conexión



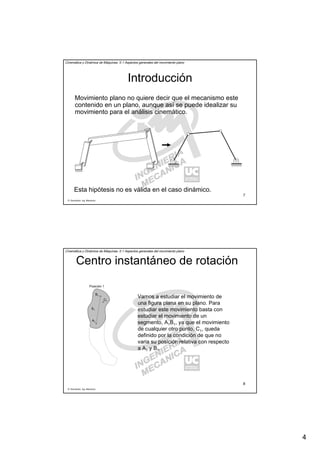
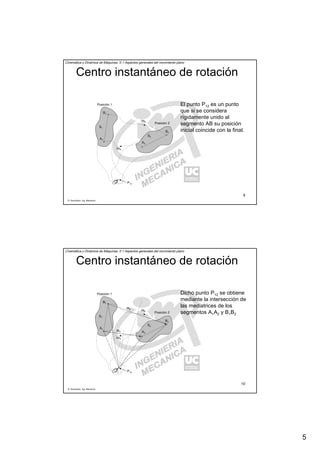
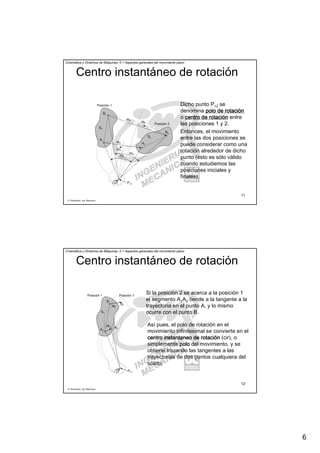
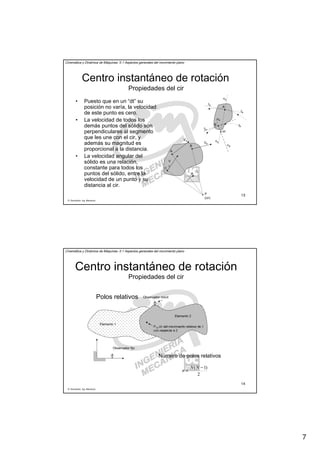
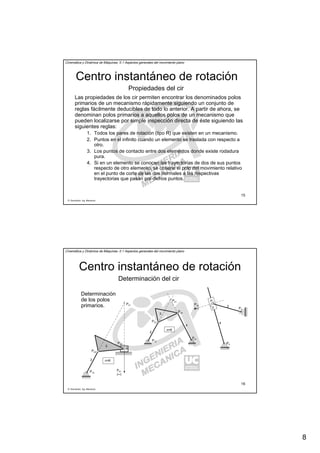
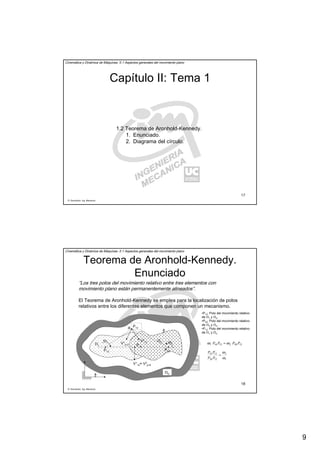
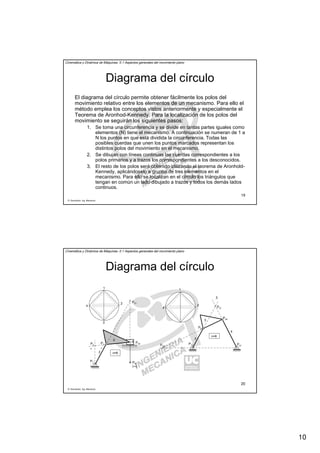


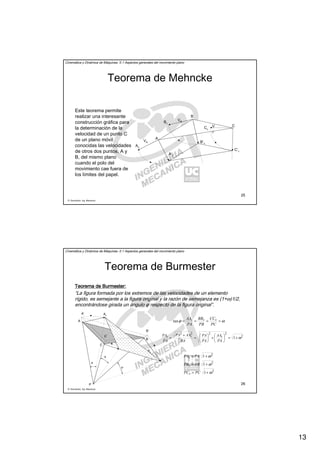
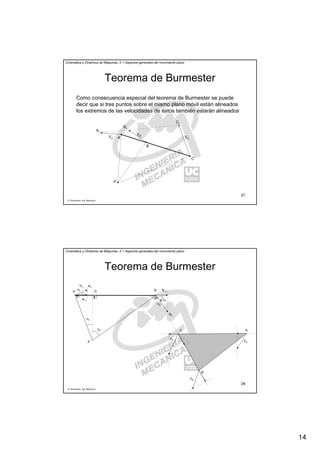
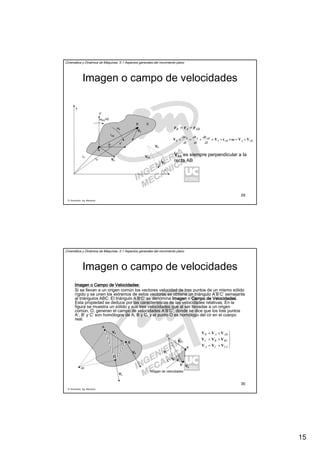
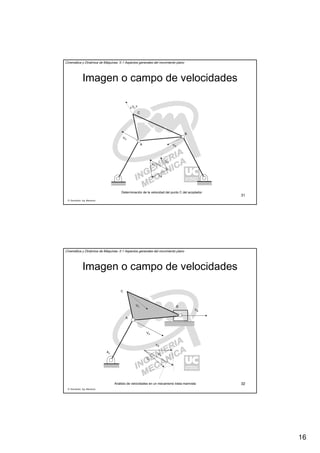



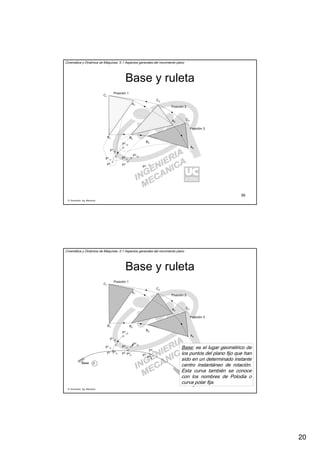
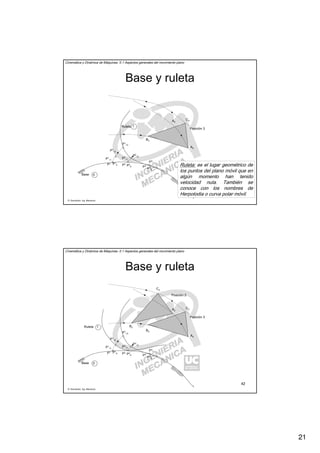
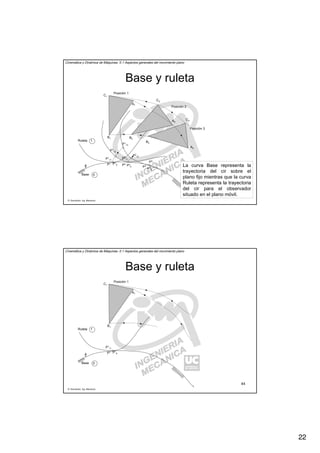
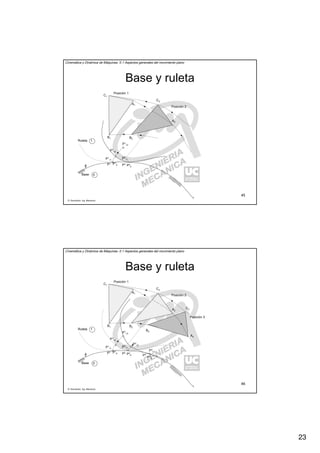
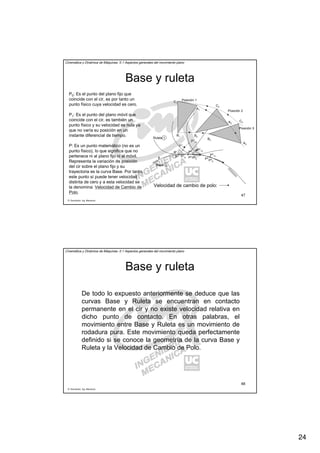

El documento aborda los aspectos generales del movimiento plano, centrándose en conceptos como el centro instantáneo de rotación (CIR) y el teorema de Aronhold-Kennedy, que son fundamentales para el análisis y síntesis cinemática de mecanismos. Se exploran las propiedades del movimiento plano, incluyendo su relación con las velocidades y aceleraciones a través de diferentes teoremas. También se discuten ejemplos aplicativos y métodos gráficos para determinar polos y relaciones entre elementos mecánicos en movimiento.























































































