Descargado 252 veces
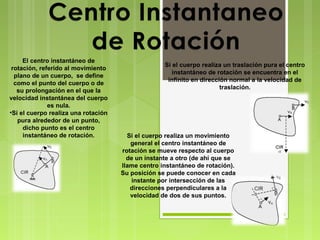
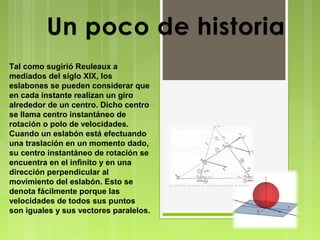
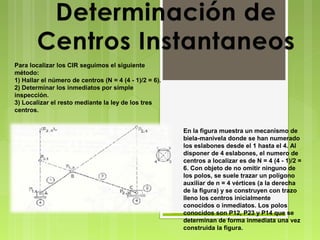

El documento define el centro instantáneo de rotación como el punto donde la velocidad de un cuerpo en movimiento plano es nula. Explica que durante una rotación pura, el centro es el punto de rotación, y durante una traslación pura, está en el infinito perpendicular a la velocidad. También describe cómo calcular los centros instantáneos de rotación para mecanismos como bielas y manivelas.























































































