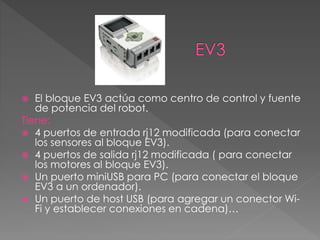
El documento describe las características y capacidades de varios componentes de los sistemas LEGO Mindstorms NXT y EV3, incluyendo el procesador, memoria y conectores del NXT, así como los motores, sensores (de contacto, temperatura, luz, rotación, sonido, color, aceleración, ultrasonido y brújula) y su funcionalidad. También describe el bloque EV3 y sus puertos de entrada/salida para conectar sensores y motores.