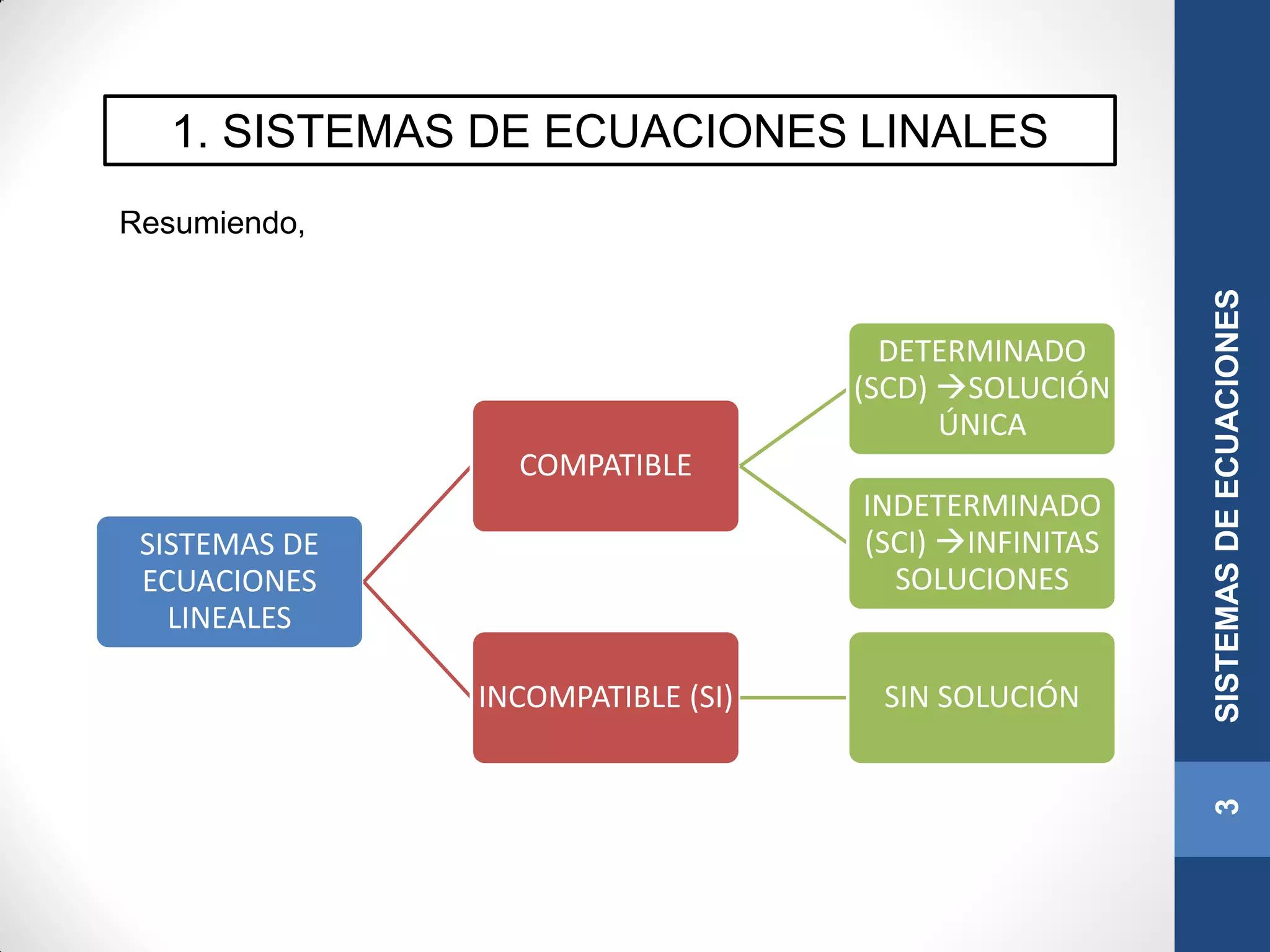
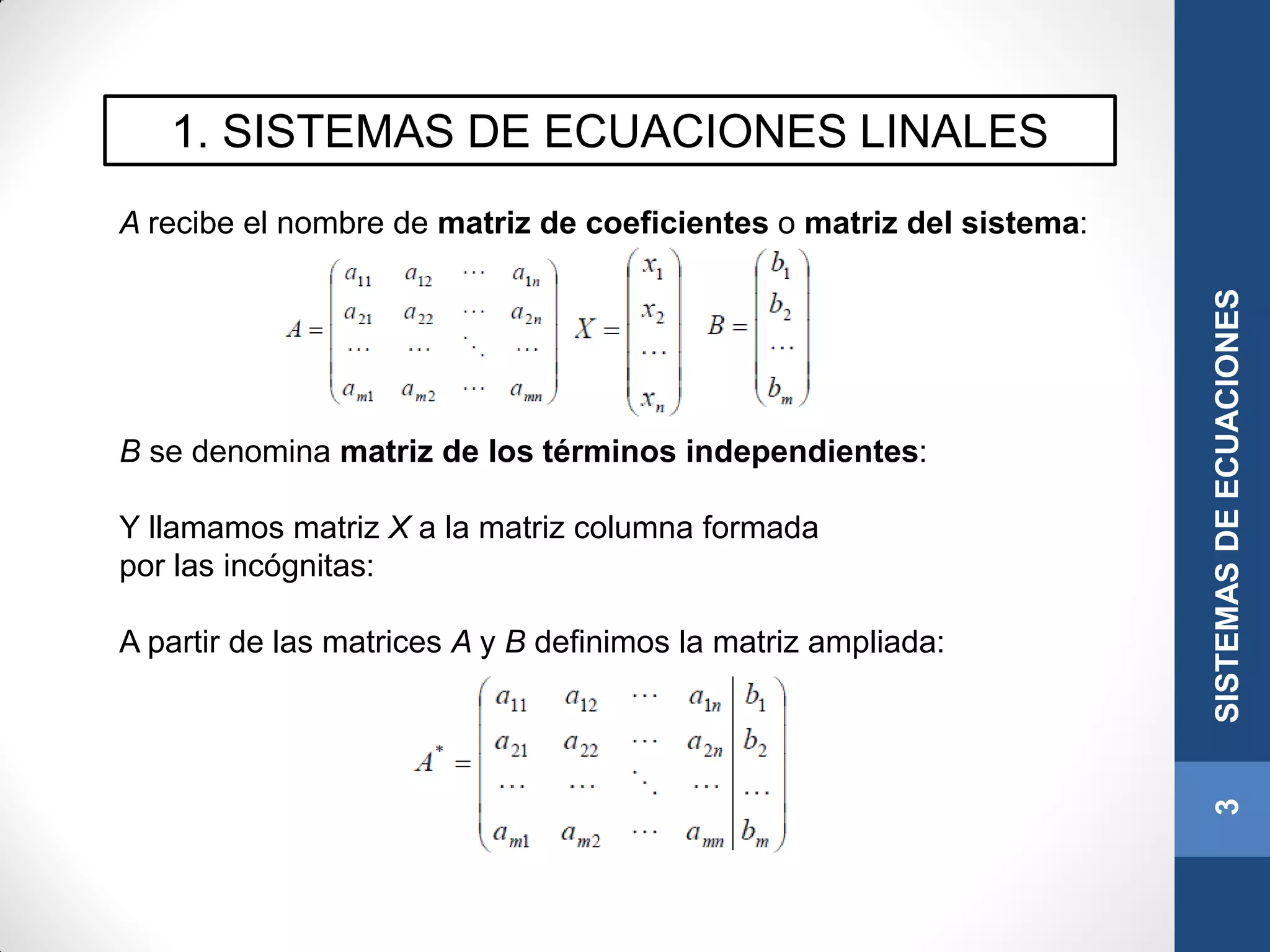
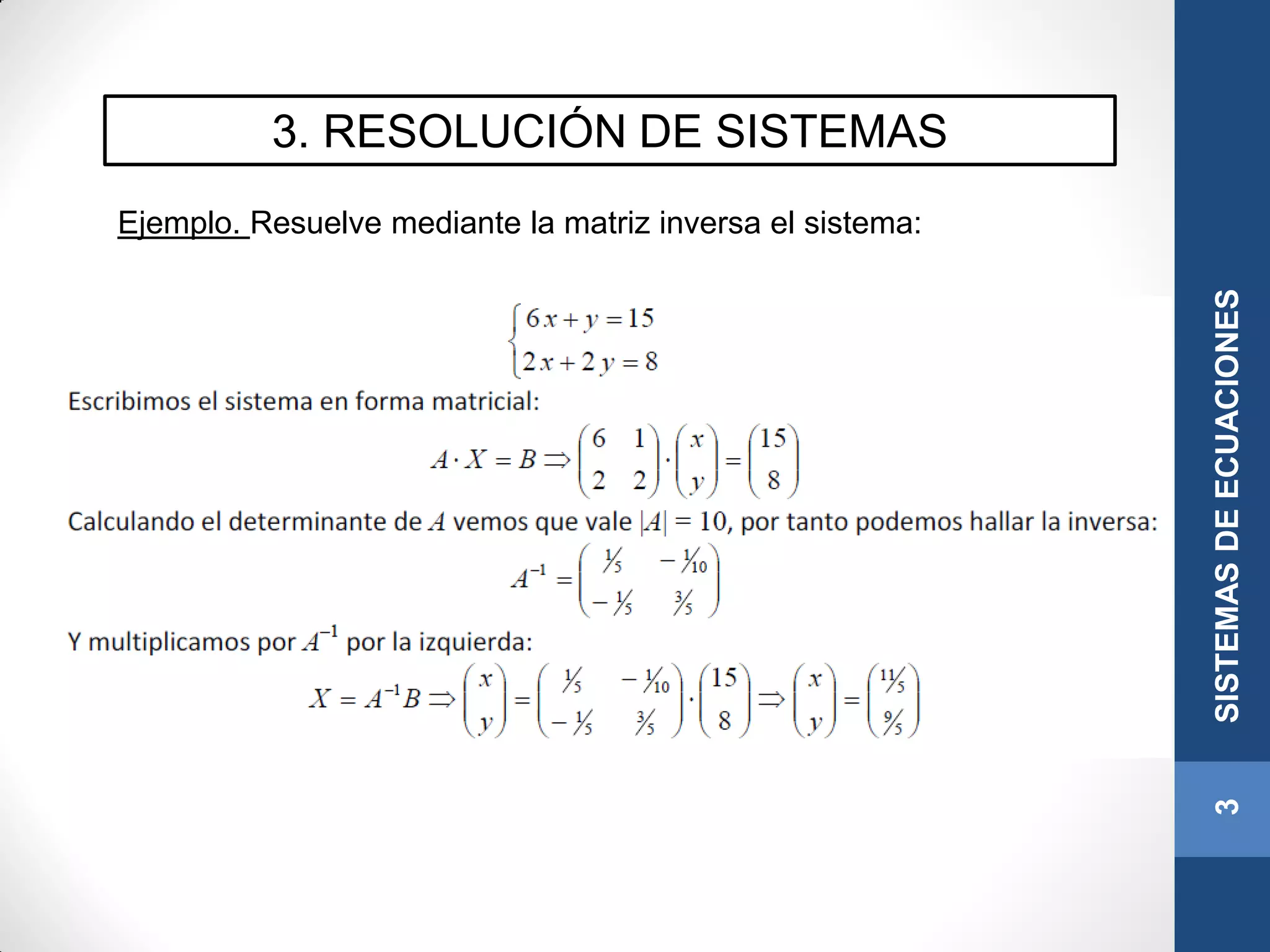
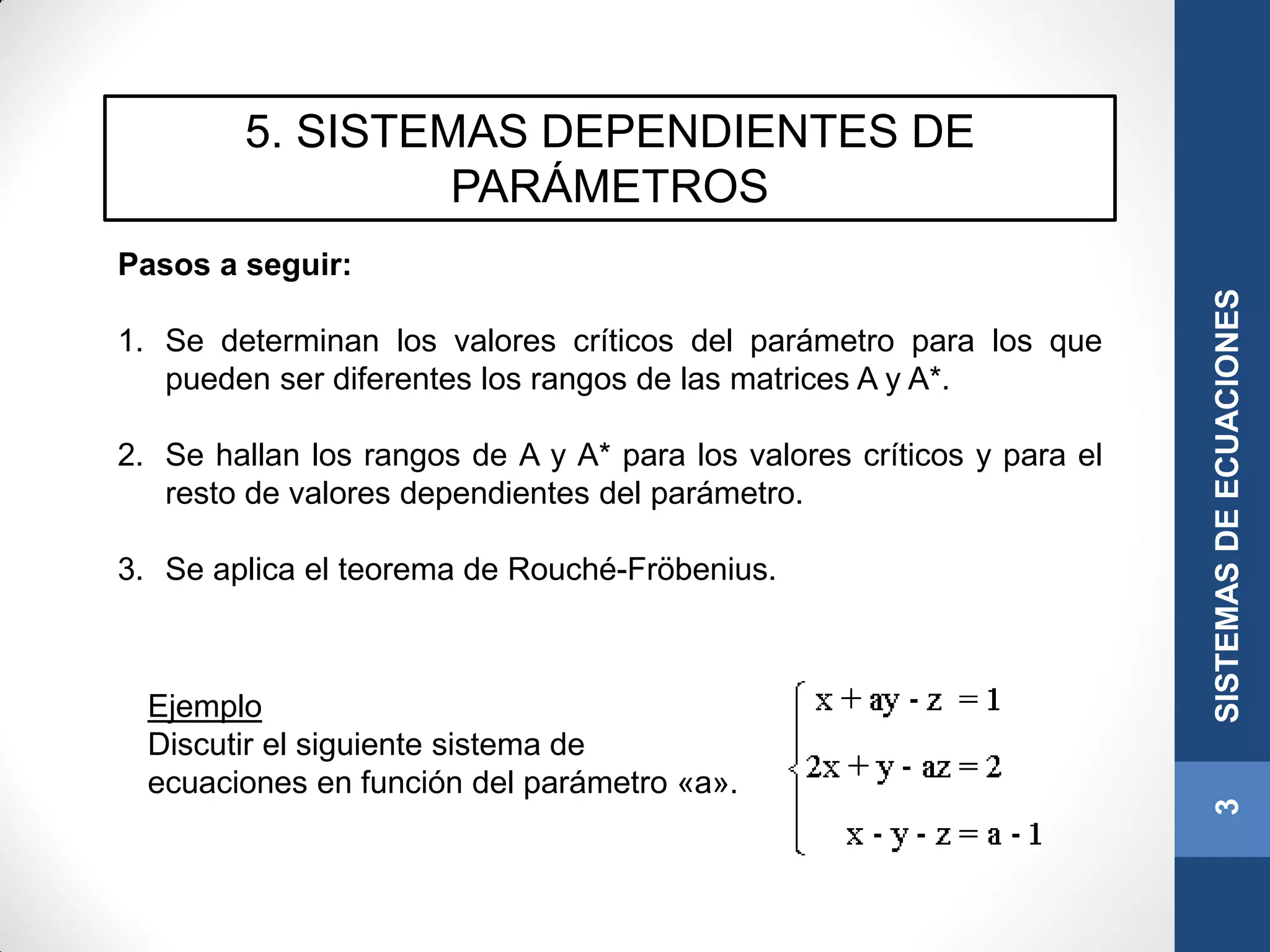
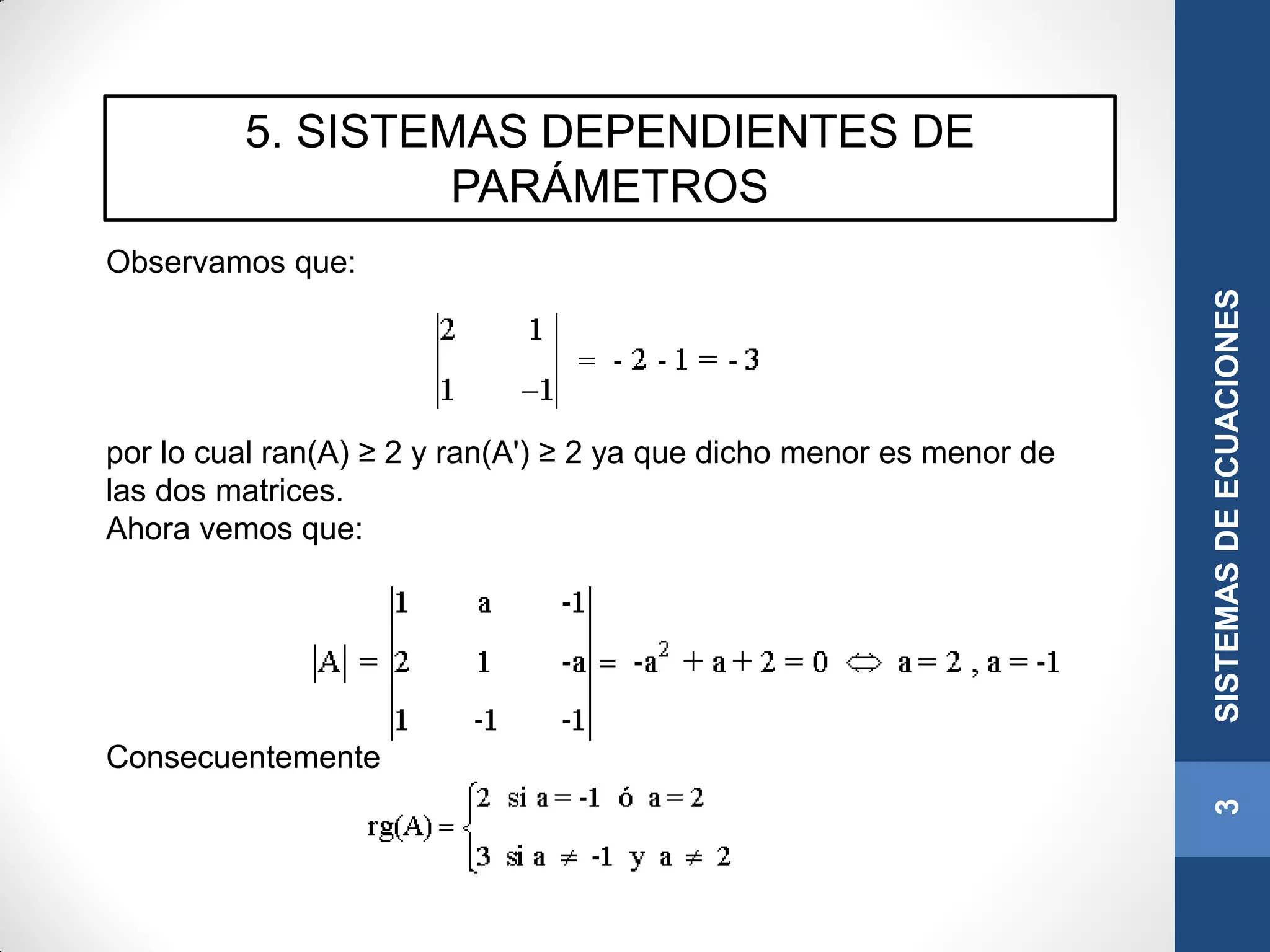
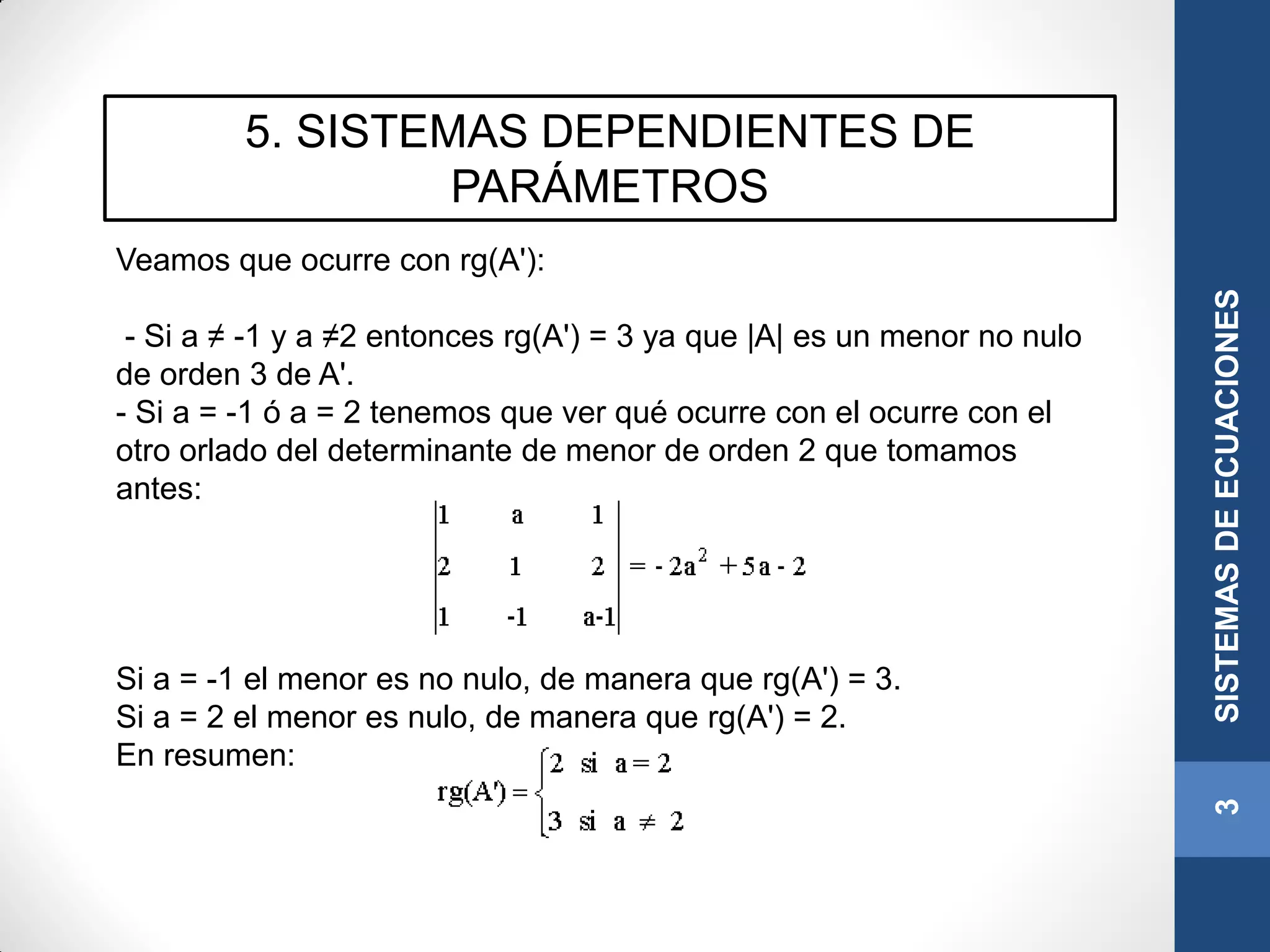
Este documento trata sobre sistemas de ecuaciones lineales. Explica conceptos como matrices asociadas a sistemas, el teorema de Rouché-Fröbenius para clasificar sistemas, y métodos para resolver sistemas como el método de Gauss, ecuaciones matriciales y la regla de Cramer. También cubre sistemas homogéneos y sistemas dependientes de parámetros.







































![Factorizacion lu[1]](https://cdn.slidesharecdn.com/ss_thumbnails/factorizacionlu1-100727204723-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)