Descargado 146 veces

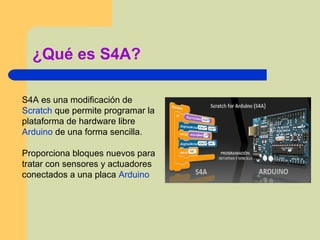

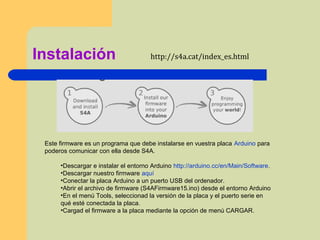
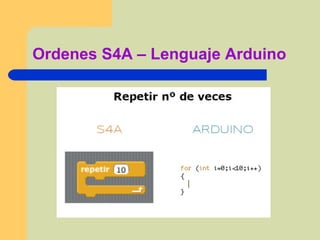
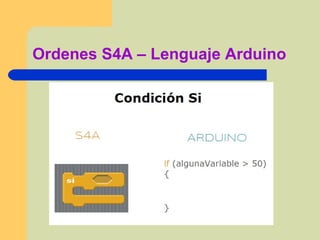
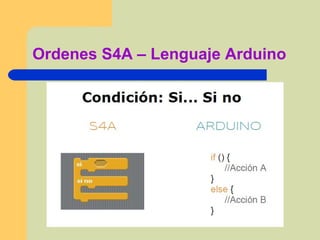
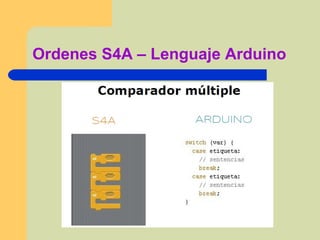
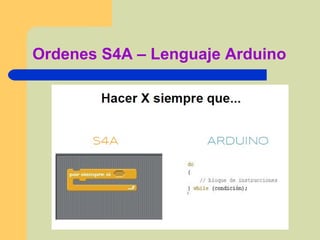
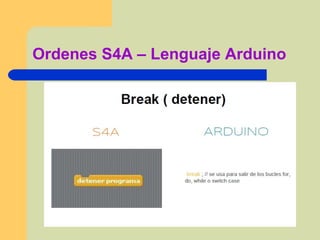
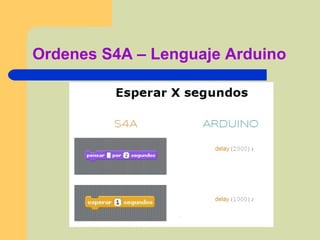
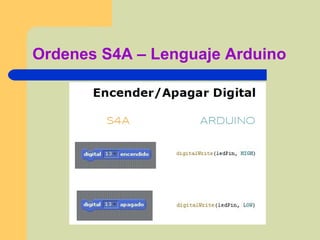
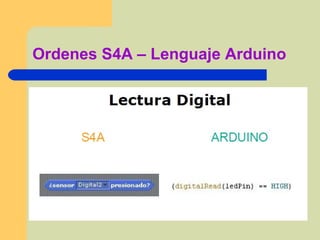
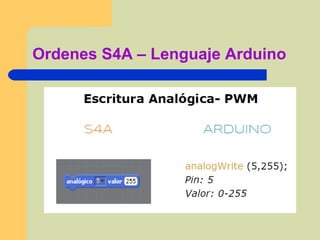
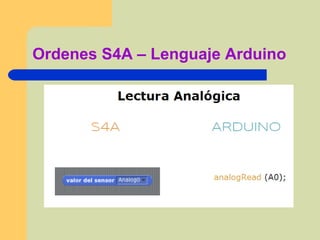
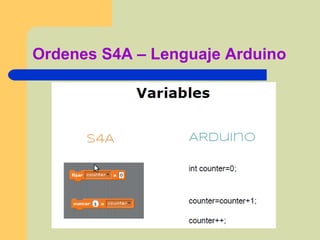
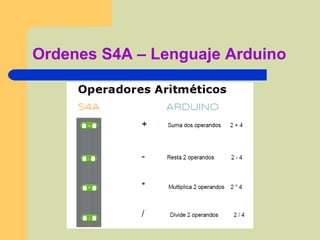
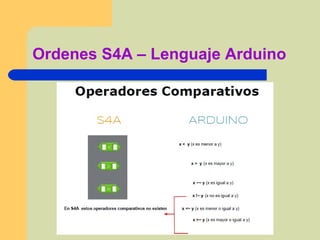
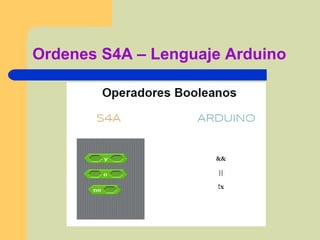
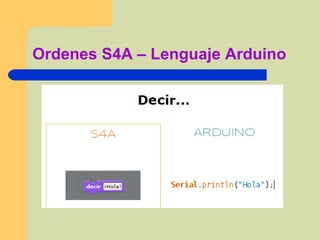
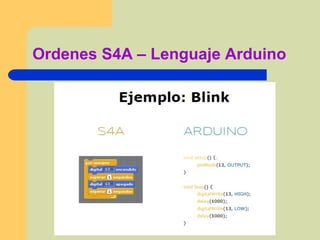
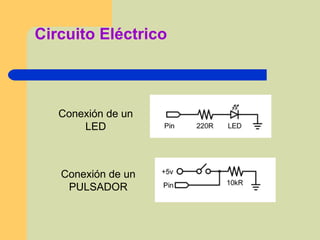
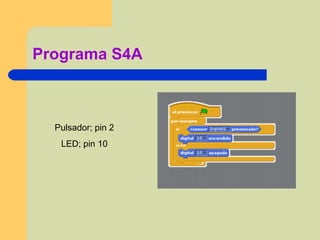
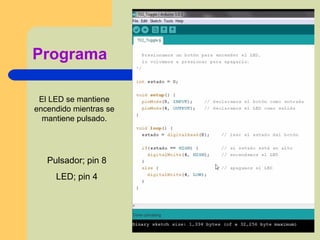
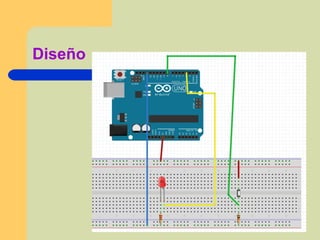
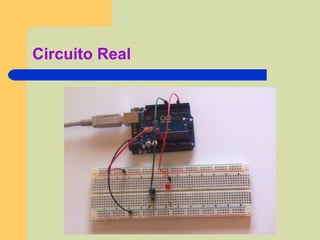
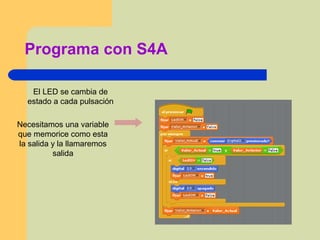
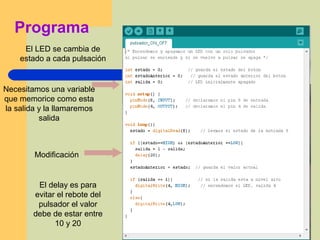

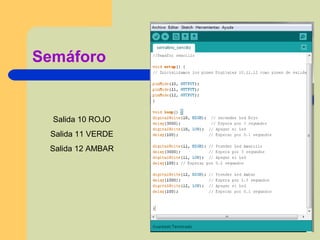
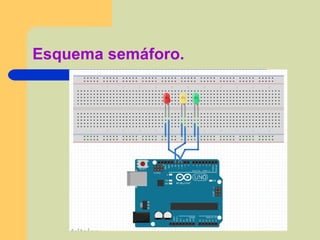
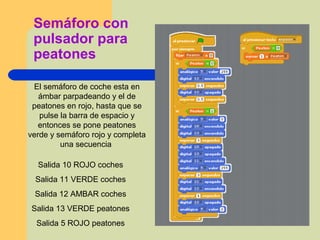
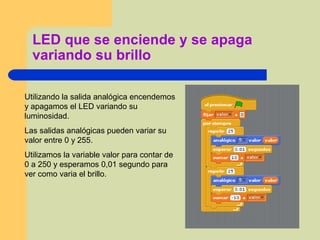
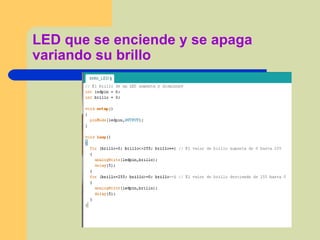
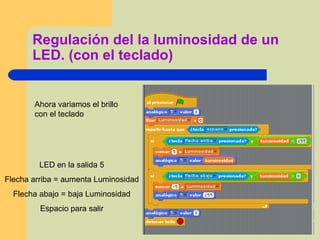
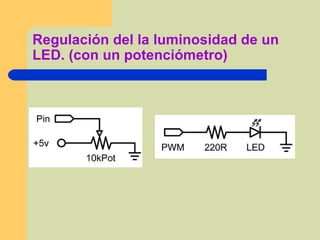
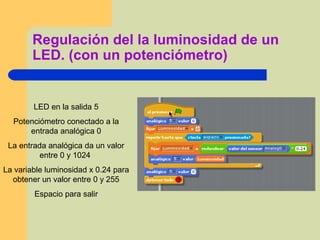
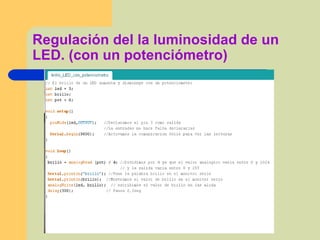
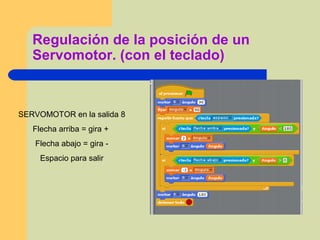
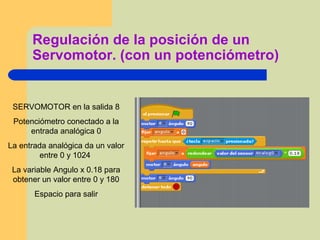
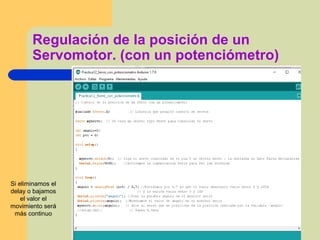






El documento describe cómo programar Arduino utilizando tanto el lenguaje de programación Arduino como S4A, una versión modificada de Scratch. S4A proporciona bloques que permiten controlar sensores y actuadores conectados a una placa Arduino de una manera sencilla. El documento explica cómo instalar S4A en una placa Arduino y proporciona ejemplos de programas S4A para controlar LEDs, semáforos y motores.













































![Control de un Motor [Autoaaaaaaaaaaaaaaaaaguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/controldeunmotorautoguardado-241113235820-1bbdae93-thumbnail.jpg?width=640&height=640&fit=bounds)




















































