
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Navegacion presentacion 01
Similar a Navegacion presentacion 01 (20)
Más de John Fredy Morales
Más de John Fredy Morales (16)
Último
Último (20)
Navegacion presentacion 01
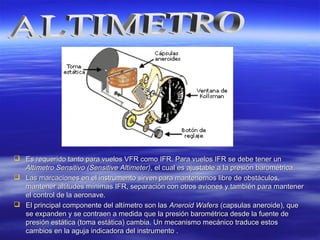
- 1. Es requerido tanto para vuelos VFR como IFR. Para vuelos IFR se debe tener unEs requerido tanto para vuelos VFR como IFR. Para vuelos IFR se debe tener un Altímetro Sensitivo (Sensitive Altimeter)Altímetro Sensitivo (Sensitive Altimeter), el cual es ajustable a la presión barométrica., el cual es ajustable a la presión barométrica. Las marcaciones en el instrumento sirven para mantenernos libre de obstáculos,Las marcaciones en el instrumento sirven para mantenernos libre de obstáculos, mantener altitudes mínimas IFR, separación con otros aviones y también para mantenermantener altitudes mínimas IFR, separación con otros aviones y también para mantener el control de la aeronave.el control de la aeronave. El principal componente del altímetro son lasEl principal componente del altímetro son las Aneroid WafersAneroid Wafers (capsulas aneroide), que(capsulas aneroide), que se expanden y se contraen a medida que la presión barométrica desde la fuente dese expanden y se contraen a medida que la presión barométrica desde la fuente de presión estática (toma estática) cambia. Un mecanismo mecánico traduce estospresión estática (toma estática) cambia. Un mecanismo mecánico traduce estos cambios en la aguja indicadora del instrumento .cambios en la aguja indicadora del instrumento .
- 2. Al moverlo cambia aproximadamente 1.000 ft por pulgada de presión. Aparece en algunos altímetros cuando se este mostrando una altitud por debajo de 10.000 ft MSL. • El altímetro esta marcando 2.800 ft MSL. • La escala en la ventana esta reglada a 29.92 Hg.....
- 3. BOTON DE SELECCION ESCALA EN PULGADAS DE MERCURIO (Hg....) ESCALA EN MILIBARES (mb) Indicador visible para altitudes por debajo de 10.000 ft.
- 4. MILES CENTENAS Desaparece al indicar altitudes por encima de 10.000 ft MSL.
- 5. PARA TENER ENCUENTA EN LA OPERACIÓN DEL ALTIMETROPARA TENER ENCUENTA EN LA OPERACIÓN DEL ALTIMETRO:: 1.1. Las variaciones en la temperatura expanden y contraen la atmósfera y aumenta o disminuye la presión que censaLas variaciones en la temperatura expanden y contraen la atmósfera y aumenta o disminuye la presión que censa el instrumento.el instrumento. • Cuando la temperatura esCuando la temperatura es mayormayor a la Standard, el altímetro indicara una altitud (indicated altitude)a la Standard, el altímetro indicara una altitud (indicated altitude) menor a la realmenor a la real (True Altitude)(True Altitude).. • Cuando la temperatura esCuando la temperatura es menormenor a la Standard, el altímetro indicara (indicated altitude) una altituda la Standard, el altímetro indicara (indicated altitude) una altitud mayor a la realmayor a la real (True altitude)(True altitude).. 2.2. Los cambios en la presión del la superficie afecta también los niveles de presión en la medición de la altitud si no esLos cambios en la presión del la superficie afecta también los niveles de presión en la medición de la altitud si no es corregida en la escala de reglaje.corregida en la escala de reglaje. • Volando de una zona de alta presión (Ex:30.22 Hg....) a una de baja presión (29.22 Hg....) sin seleccionar laVolando de una zona de alta presión (Ex:30.22 Hg....) a una de baja presión (29.22 Hg....) sin seleccionar la corrección altimétrica, se estaría volando a una altitud menor a la deseada.corrección altimétrica, se estaría volando a una altitud menor a la deseada.
- 6. En ruta a FL290, el altímetro esta correctamente programado, pero durante el descensoEn ruta a FL290, el altímetro esta correctamente programado, pero durante el descenso no se coloca el QNH de la estación que es 30.26 Hg..... Si la elevación del terreno esno se coloca el QNH de la estación que es 30.26 Hg..... Si la elevación del terreno es 134 ft y el altímetro esta funcionando de forma correcta, cual será la indicación luego del134 ft y el altímetro esta funcionando de forma correcta, cual será la indicación luego del aterrizaje?aterrizaje? 30.26 – 29.92= 0.3430.26 – 29.92= 0.34 1 Hg. – 1000 ft = 340 ft1 Hg. – 1000 ft = 340 ft .34 Hg. - X.34 Hg. - X Debido a que el vuelo provenía de un área de baja presión (29.92) hacia una de altaDebido a que el vuelo provenía de un área de baja presión (29.92) hacia una de alta presión (30.26), se le resta a la elevación del campo (de baja a alta presión la altitudpresión (30.26), se le resta a la elevación del campo (de baja a alta presión la altitud verdadera será mayor a la indicada).verdadera será mayor a la indicada). 134 – 340 = -206 ft134 – 340 = -206 ft →→ 206 ft por debajo del nivel medio del mar.206 ft por debajo del nivel medio del mar. Si va a salir de un aeropuerto donde no puede información barométrica del área paraSi va a salir de un aeropuerto donde no puede información barométrica del área para seleccionarla en el altímetro (Hg/mb) debo seleccionar en el instrumento la elevación delseleccionarla en el altímetro (Hg/mb) debo seleccionar en el instrumento la elevación del aeropuerto.aeropuerto.
- 8. INSTRUMENT CHECKINSTRUMENT CHECK:: Adicionalmente del chequeo del sistemaAdicionalmente del chequeo del sistema estático, se debe chequear el altímetroestático, se debe chequear el altímetro Antes de realizar un vuelo IFR,Antes de realizar un vuelo IFR, Seleccionando la correcciónSeleccionando la corrección Barométrica en la ventana y compararBarométrica en la ventana y comparar La indicación con la elevaciónLa indicación con la elevación Conocida de la estación. EstaConocida de la estación. Esta Indicación no puede ser mayor aIndicación no puede ser mayor a 75 ft75 ft.. Solo cuando existan condiciones deSolo cuando existan condiciones de atmósfera ISA la altitud verdadera seráatmósfera ISA la altitud verdadera será igual a la altitud de presión.igual a la altitud de presión. La altitud por densidad será la misma aLa altitud por densidad será la misma a la altitud por presión cuando hayala altitud por presión cuando haya temperatura Standard.temperatura Standard.
- 9. El variómetro es conocido comoEl variómetro es conocido como indicador de velocidad verticalindicador de velocidad vertical (Vertical Speed Indicator o(Vertical Speed Indicator o Vertical Velocity Indicator)Vertical Velocity Indicator) muestra al piloto dos cosas:muestra al piloto dos cosas: a.a. Si el avión está ascendiendo,Si el avión está ascendiendo, descendiendo, o vuela nivelado. Ldescendiendo, o vuela nivelado. L b.b. La velocidad vertical o régimen,La velocidad vertical o régimen, en pies por minuto (f.p.m), delen pies por minuto (f.p.m), del ascenso o descenso.ascenso o descenso.
- 10. El principio de funcionamiento de este aparato, similar al del altímetro, está basado en laEl principio de funcionamiento de este aparato, similar al del altímetro, está basado en la contracción/expansión de un diafragma o membrana debido a la diferencia de presión entre elcontracción/expansión de un diafragma o membrana debido a la diferencia de presión entre el interior y el exterior de la misma. Aunque este instrumento funciona por presión diferencial,interior y el exterior de la misma. Aunque este instrumento funciona por presión diferencial, únicamente necesita recibir la presión estática.únicamente necesita recibir la presión estática. Caja hermética con dos tomas estáticas, una directamente conectada al diafragma (sistemaCaja hermética con dos tomas estáticas, una directamente conectada al diafragma (sistema estático) y otra por medio de un orificio calibrado. Esta diferencia de presión hace que la membranaestático) y otra por medio de un orificio calibrado. Esta diferencia de presión hace que la membrana se dilate o se contraiga, moviendo a trabes del sistema de varillas y engranajes la aguja indicadora.se dilate o se contraiga, moviendo a trabes del sistema de varillas y engranajes la aguja indicadora. Ascensos / Descensos = Diferencia de presión entre el interior y exterior de la membranaAscensos / Descensos = Diferencia de presión entre el interior y exterior de la membrana Nivelar = Presión entre ele interior y el exterior de la membrana se igualan.Nivelar = Presión entre ele interior y el exterior de la membrana se igualan.
- 11. En aviones ligeros, la escala suele estar graduada con cada marca representando una velocidad de ascenso oEn aviones ligeros, la escala suele estar graduada con cada marca representando una velocidad de ascenso o descenso de cien pies por minuto (100 f.p.m.), hasta un máximo de 2000 f.p.m.descenso de cien pies por minuto (100 f.p.m.), hasta un máximo de 2000 f.p.m. Los cambios súbitos de la posición de morro, maniobras de viraje bruscas, o el vuelo en aire turbulento puedenLos cambios súbitos de la posición de morro, maniobras de viraje bruscas, o el vuelo en aire turbulento pueden producir falsas presiones estáticas que hagan las indicaciones del instrumento erróneas o inexactas.producir falsas presiones estáticas que hagan las indicaciones del instrumento erróneas o inexactas. Este instrumento lleva implícito un retraso en la indicación exacta del número de pies por minuto de ascenso oEste instrumento lleva implícito un retraso en la indicación exacta del número de pies por minuto de ascenso o descenso,descenso, retraso que puede llegar a ser de hasta 9 segundosretraso que puede llegar a ser de hasta 9 segundos; la indicación de subida o bajada es sin embargo; la indicación de subida o bajada es sin embargo inmediata. Por esta razón no debe utilizarse el VSI como referencia principal de vuelo nivelado, pues cuando elinmediata. Por esta razón no debe utilizarse el VSI como referencia principal de vuelo nivelado, pues cuando el avión comience a ascender o descender, el VSI indicará inicialmente el cambio en la dirección correcta, pero tardaráavión comience a ascender o descender, el VSI indicará inicialmente el cambio en la dirección correcta, pero tardará algunos segundos en detectar la tasa real de ascenso o descenso. Perseguir la aguja del VSI para mantener unalgunos segundos en detectar la tasa real de ascenso o descenso. Perseguir la aguja del VSI para mantener un vuelo nivelado es como meter el avión en una montaña rusa.vuelo nivelado es como meter el avión en una montaña rusa.
- 12. PITOT BLOCKAGEPITOT BLOCKAGE:: • ElEl VelocímetroVelocímetro es el único instrumento que se ve afectado cuando el tubo pitot sees el único instrumento que se ve afectado cuando el tubo pitot se bloquea.bloquea. 1.1. Pitot Tube = Blockeage + Drain HolePitot Tube = Blockeage + Drain Hole →→ Open + Static PortOpen + Static Port →→ Open =Open = Velocímetro vaVelocímetro va a indicar cero (0a indicar cero (0), pero el altímetro y el VSI estarán operando normal.), pero el altímetro y el VSI estarán operando normal.
- 13. PITOT BLOCKAGEPITOT BLOCKAGE:: 2.2. Pitot Tube = Blockage + Drain HolePitot Tube = Blockage + Drain Hole →→ Blockage + Static PortBlockage + Static Port →→ Open =Open = VelocímetroVelocímetro va a actuar como un altímetro, al ascender aumentara y al descender disminuirá suva a actuar como un altímetro, al ascender aumentara y al descender disminuirá su indicaciónindicación, pero el altímetro y el VSI estarán operando normal., pero el altímetro y el VSI estarán operando normal.
- 14. BLOCKED STATIC – OPEN PITOTBLOCKED STATIC – OPEN PITOT:: • Indicaciones incorrectas en el velocímetro de la siguiente manera:Indicaciones incorrectas en el velocímetro de la siguiente manera: Al operar sobre la altitud en donde se bloqueo la toma estática, el velocímetro indicaraAl operar sobre la altitud en donde se bloqueo la toma estática, el velocímetro indicara menos de lo real.menos de lo real. Al operar por debajo de la altitud en donde se bloqueo la toma estática, el velocímetroAl operar por debajo de la altitud en donde se bloqueo la toma estática, el velocímetro indicara mas de lo real.indicara mas de lo real.
- 15. USING ALTERNATE COCKPITUSING ALTERNATE COCKPIT STATIC AIRSTATIC AIR:: Velocímetro y altímetro daránVelocímetro y altímetro darán indicaciones mayores a las normales, yindicaciones mayores a las normales, y el VSI indicara momentáneamenteel VSI indicara momentáneamente ascenso.ascenso. BROKEN VSI GLASSBROKEN VSI GLASS:: Velocímetro y altímetro daránVelocímetro y altímetro darán indicaciones mayores a las normales, yindicaciones mayores a las normales, y el VSI dará indicaciones contrarias.el VSI dará indicaciones contrarias.
- 18. ESPECTRO RADIOELÉCTRICO Se denomina Espectro Radioeléctrico a la porción delSe denomina Espectro Radioeléctrico a la porción del Espectro Electromagnético ocupado por las ondas de radio, oEspectro Electromagnético ocupado por las ondas de radio, o sea las que se usan para telecomunicacionessea las que se usan para telecomunicaciones El Espectro Electromagnético esta compuesto por las ondasEl Espectro Electromagnético esta compuesto por las ondas de radio, las infrarrojas, la luz visible, la luz ultravioleta, losde radio, las infrarrojas, la luz visible, la luz ultravioleta, los rayos X y los rayos gamas: todas estas son formas derayos X y los rayos gamas: todas estas son formas de energía similares, pero se diferencian en laenergía similares, pero se diferencian en la FRECUENCIAFRECUENCIA yy lala LONGITUDLONGITUD de su ondade su onda
- 19. Las Frecuencias se miden en "Hertzios" (ciclos porLas Frecuencias se miden en "Hertzios" (ciclos por segundo): en telecomunicaciones se usan los siguientessegundo): en telecomunicaciones se usan los siguientes múltiplos de esta medida para las frecuencias de radio:múltiplos de esta medida para las frecuencias de radio: La longitud de onda se mide en metros (en ondas de radioLa longitud de onda se mide en metros (en ondas de radio se usan: metros, centímetros y milímetros); la relaciónse usan: metros, centímetros y milímetros); la relación entre frecuencia y amplitud es inversa y la relación entreentre frecuencia y amplitud es inversa y la relación entre ambas se expresa en la siguiente ecuación:ambas se expresa en la siguiente ecuación: 300.000300.000 = Frecuencia en Khz Longitud= Frecuencia en Khz Longitud de onda en metrosde onda en metros múltiplo abreb. Hertz también denominado: KiloHertz MegaHertz GigaHertz KHz MHz GHz 1.000Hz 1.000KHz 1.000MHz Kilociclos (Kc/s) Megaciclos(Mc/s) Gigaciclos (Gc/s)
- 20. La división del espectro radioeléctrico: DISTRIBUCIÓN CONVENCIONAL DEL ESPECTRO RADIOELECTRICO SIGLA DENOMINACIÓN LONGITUD DE ONDA GAMA DE FRECUENC. CARACTERISTICAS USO TIPICO VLF VERY LOW FRECUENCIES Frecuencias muy bajas 30.000 m a 10.000 m 10 KHz a 30 KHz Propagación por onda de tierra, atenuación débil. Características estables. ENLACES DE RADIO A GRAN DISTANCIA LF LOW FRECUENCIES Frecuencias bajas 10.000 m. a 1.000 m. 30 KHz a 300 KHz Similar a la anterior, pero de características menos estables. Enlaces de radio a gran distancia, ayuda a la navegación aérea y marítima. NDB MF MEDIUM FRECUENCIES Frecuencias medias 1.000 m. a 100 m. 300 KHz a 3 MHz Similar a la precedente pero con una absorción elevada durante el día. Propagación prevalentemente Ionosférica durante le noche. RADIODIFUSIÓN NDB HF HIGH FRECUENCIES Frecuencias altas 100 m. a l0 m. 3 MHz a 30 MHz Propagación prevalentemente Ionosférica con fuertes variaciones estacionales y en las diferentes horas del día y de la noche. COMUNICACIONES DE TODO TIPO A MEDIA Y LARGA DISTANCIA VHF VERY HIGH FRECUENCIES Frecuencias muy altas 10 m. a 1 m. 30 MHz a 300 MHz Prevalentemente propagación directa, esporádicamente propagación Ionosférica o Troposferica. Enlaces de radio a corta distancia, TELEVISIÓN, FRECUENCIA MODULADA VOR-LLZ(ILS)-MB UHF ULTRA HIGH FRECUENCIES Frecuencias ultra altas 1 m. a 10 cm. de 300 MHz a 3 GHz Exclusivamente propagación directa, posibilidad de enlaces por reflexión o a través de satélites artificiales. Enlaces de radio, Radar, Ayuda a la navegación aérea, TELEVISIÓN DME- GS SHF SUPER HIGH FRECUENCIES Frecuencias superaltas 10 cm. a 1 cm. de 3 GHz a 30 GHz COMO LA PRECEDENTE Radar, Enlaces de radio EHF EXTRA HIGH FRECUENCIES Frecuencias extra- altas 1 cm. a 1 mm. 30 GHz a 300 GHz COMO LA PRECEDENTE COMO LA PRECEDENTE EHF EXTRA HIGH FRECUENCIES Frecuencias extra- altas 1 mm. a 0,1 mm. 300 GHz a 3.000 GHz COMO LA PRECEDENTE COMO LA PRECEDENTE
- 21. ¿RADIONAVEGACION?¿RADIONAVEGACION? Rama de la Navegación Aérea en la cual se dirigeRama de la Navegación Aérea en la cual se dirige la aeronave basándose en la interpretación dela aeronave basándose en la interpretación de instrumentos a bordo los cuales reciben señalesinstrumentos a bordo los cuales reciben señales emitidas por radioayudas ubicadas en puntosemitidas por radioayudas ubicadas en puntos específicos conocidos sobre la tierraespecíficos conocidos sobre la tierra
- 22. NDB:NDB: Non Directional FinderNon Directional Finder (Radifaro no direccional).(Radifaro no direccional). Emite radiación electromagnéticaEmite radiación electromagnética en MF/LF.en MF/LF. Rango de frecuencias: 190 – 1750Rango de frecuencias: 190 – 1750 kHZ (en Colombia el rango es 202kHZ (en Colombia el rango es 202 – 1750 kHZ). Se incluyen los– 1750 kHZ). Se incluyen los marcadores para aproximacionesmarcadores para aproximaciones ILS. Emisoras comercialesILS. Emisoras comerciales (Broadcasting System) solo para(Broadcasting System) solo para vuelos VFR.vuelos VFR. Navegación deNavegación de no precisiónno precisión.. Debe ser identificadoDebe ser identificado constantemente durante unaconstantemente durante una aproximación, ya que no tieneaproximación, ya que no tiene bandera debandera de INOPINOP..
- 23. CLASIFICACIONCLASIFICACION →→ Se clasificanSe clasifican según su potencia y el uso que sesegún su potencia y el uso que se les de la siguiente manera:les de la siguiente manera: • Clase L: Potencia menor a 50 W,Clase L: Potencia menor a 50 W, usado en inmediaciones de losusado en inmediaciones de los aeropuertos.aeropuertos. • Clase M: Potencia de 50 a 2000 W,Clase M: Potencia de 50 a 2000 W, utilizado en áreas terminales.utilizado en áreas terminales. • Clase H: Potencia mayor a 2000 W,Clase H: Potencia mayor a 2000 W, empleados en ruta.empleados en ruta. • Radiofaro para ILS cuya potenciaRadiofaro para ILS cuya potencia es de 25 W o menos, llamadoses de 25 W o menos, llamados ““radiofaros de localizaciónradiofaros de localización”” ( Compás Locators).( Compás Locators).
- 25. CARACTERÍSTICASCARACTERÍSTICAS Señal poco estable y con interferenciasSeñal poco estable y con interferencias Efecto costaEfecto costa No es afectado por la línea visualNo es afectado por la línea visual Efecto noche (Ionosfera)Efecto noche (Ionosfera) Afectado por las Tormentas eléctricasAfectado por las Tormentas eléctricas (CB)(CB) No tiene bandera de inoperatividadNo tiene bandera de inoperatividad Fácil seguimiento e interpretaciónFácil seguimiento e interpretación SímboloSímbolo Identificación: Código Morse de tresIdentificación: Código Morse de tres letrasletras
- 26. Receptor: Señal NDB y Emisoras AMReceptor: Señal NDB y Emisoras AM Antenas: Loop (Censa la dirección de la estación porAntenas: Loop (Censa la dirección de la estación por medio de la fuerza de la señal) and sense (Provee lamedio de la fuerza de la señal) and sense (Provee la información para TO – FROM)información para TO – FROM) Panel de controlPanel de control CarátulaCarátula
- 27. OFF – VOLOFF – VOL ADF: Modo de operación normal e identificaciónADF: Modo de operación normal e identificación BFO: Beat freq oscillator (Receptor de identificación por clave Morse)BFO: Beat freq oscillator (Receptor de identificación por clave Morse) ANT: Para mejor identificación, la aguja de la carátula no daANT: Para mejor identificación, la aguja de la carátula no da marcación, sirve como test.marcación, sirve como test. TEST: Deflecta la agujaTEST: Deflecta la aguja FRQ: Cambia la frecuencia stby a activaFRQ: Cambia la frecuencia stby a activa Selector de FrecuenciasSelector de Frecuencias
- 28. FIJAFIJA →→ MHMH (Indicación de la aguja)(Indicación de la aguja) + RB+ RB ((Indicación de Brújula)Indicación de Brújula) = MB= MB (Dirección hacia la estación(Dirección hacia la estación).). Ejemplo: RB= 350Ejemplo: RB= 350° / MH= 270° .° / MH= 270° . 350+270= 620-360=350+270= 620-360= 260°260° AJUSTABLEAJUSTABLE AUTOMÁTICA SIMPLEAUTOMÁTICA SIMPLE AUTOMÁTICA DOBLE (RMI).AUTOMÁTICA DOBLE (RMI). La agujaLa aguja delgada normalmente se utiliza para eldelgada normalmente se utiliza para el ADF y la gruesa para el VORADF y la gruesa para el VOR
- 29. ORIENTACIÓNORIENTACIÓN 1. Ajuste de Frecuencia: - Encender el equipo1. Ajuste de Frecuencia: - Encender el equipo - Seleccionar frecuencia- Seleccionar frecuencia - Identificar- Identificar - Corroborar marcación- Corroborar marcación -- Ajustar carátula con rumbo (PA-28 Ajustable)Ajustar carátula con rumbo (PA-28 Ajustable) - Interpretar marcación para- Interpretar marcación para - navegar- navegar 2.Marcación:2.Marcación:
- 30. QDM: Rumbo magnéticoQDM: Rumbo magnético hacia la estación.hacia la estación. QDR: Rumbo magnéticoQDR: Rumbo magnético de salida de la estación.de salida de la estación.
- 31. HOMING TRACKINGHOMING TRACKING Mantenerse enfrentado a laMantenerse enfrentado a la estación sin importar el radialestación sin importar el radial Volar sobre un radialVolar sobre un radial específicoespecífico
- 32. Consideraciones:Consideraciones: - Donde estoy?- Donde estoy? - Para donde voy?- Para donde voy? Métodos:Métodos: Visualizado:Visualizado: Constante:Constante: - Entrando: Radial pedido +/- 90º- Entrando: Radial pedido +/- 90º - Saliendo: Radial pedido +/- 45º- Saliendo: Radial pedido +/- 45º Visualizado en la carátula:Visualizado en la carátula: - Entrando: Rumbo deseado-cabeza-30º- Entrando: Rumbo deseado-cabeza-30º - Saliendo: Cola-Radial deseado-30º- Saliendo: Cola-Radial deseado-30º
- 33. SECUENCIA DE INTERCEPTACIÓN ADFSECUENCIA DE INTERCEPTACIÓN ADF 1. Determine el rumbo de interceptación por1. Determine el rumbo de interceptación por cualquiera de los métodoscualquiera de los métodos 2. Volar dicho rumbo y conservarlo hasta que2. Volar dicho rumbo y conservarlo hasta que intercepte el QDM o QDR solicitadointercepte el QDM o QDR solicitado 3. Si se esta procediendo hacia la estación,3. Si se esta procediendo hacia la estación, cuando la cabeza de la aguja indique el QDMcuando la cabeza de la aguja indique el QDM solicitado se vuela dicho rumbo, si se estasolicitado se vuela dicho rumbo, si se esta saliendo de la estación cuando la cola indiquesaliendo de la estación cuando la cola indique el QDR solicitado se vuela dicho rumbo.el QDR solicitado se vuela dicho rumbo.
- 34. Es el cruce dos radiales o unEs el cruce dos radiales o un radial y una distancia DMEradial y una distancia DME Para determinar la posiciónPara determinar la posición de la aeronave es necesariode la aeronave es necesario seleccionar la frecuencia deseleccionar la frecuencia de ambas radioayudasambas radioayudas
- 35. VHF Omni-Directional Range (VOR) =VHF Omni-Directional Range (VOR) = Radiofaro de dirección de muy altaRadiofaro de dirección de muy alta frecuencia.frecuencia. Instalación terrestre que transmiteInstalación terrestre que transmite señales de radio para ser usadas comoseñales de radio para ser usadas como guía de navegación segura y eficazguía de navegación segura y eficaz Banda de frecuencia: 108.0 a 117.95Banda de frecuencia: 108.0 a 117.95 MHz.MHz. Radial: Línea que une al avión con laRadial: Línea que une al avión con la estación, y siempre se mira de adentroestación, y siempre se mira de adentro hacia fuera.hacia fuera. La mayoría de los VOR están equipadosLa mayoría de los VOR están equipados con transmisión de voz para sucon transmisión de voz para su identificación, los que no poseen estaidentificación, los que no poseen esta característica se identifican por mediocaracterística se identifican por medio de clave Morse.de clave Morse. Morse:Morse: _… _ _ _ …_… _ _ _ … Canal oral: This is Boston VOR.Canal oral: This is Boston VOR. En EEUU, VOR sin identificación porEn EEUU, VOR sin identificación por voz son identificados con la letravoz son identificados con la letra “W”“W” (VORW).(VORW).
- 36. TACAN (Versión militar VOR)+DME NOTA: El DME es un medidor de distancia en NM el cual será estudiado mas adelante.
- 38. Terminal VOR:Terminal VOR: • 10001000’ AGL hasta e incluyendo’ AGL hasta e incluyendo 12.000’ AGL en un radio de12.000’ AGL en un radio de 25 NM.25 NM. • Aproximación porAproximación por instrumentos.instrumentos. Low Altitude VOR:Low Altitude VOR: • Desde 1000Desde 1000’ hasta e’ hasta e incluyendo 18.000’ AGL en unincluyendo 18.000’ AGL en un rango de 40 NM.rango de 40 NM. • Ubicados en la mayoría de lasUbicados en la mayoría de las aerovias y pueden seraerovias y pueden ser utilizadas como ayuda para lautilizadas como ayuda para la aproximación cuando estaaproximación cuando esta ubicado cerca de unubicado cerca de un aeropuerto.aeropuerto. Hight Altitude VOR:Hight Altitude VOR: • De 1000De 1000’ hasta e incluyendo’ hasta e incluyendo 14.500’ AGL en un radio de14.500’ AGL en un radio de 40 NM.40 NM. • De 14.500 hasta e incluyendoDe 14.500 hasta e incluyendo 18.00018.000’ AGL en un radio de’ AGL en un radio de 100 NM100 NM • De 18.000De 18.000’ hasta e incluyendo’ hasta e incluyendo 45.000’ AGL en un rango de45.000’ AGL en un rango de 130 NM.130 NM. • De 45.000De 45.000’ hasta e incluyendo’ hasta e incluyendo 60.000’ AGL en un rango de60.000’ AGL en un rango de 100 NM.100 NM. • Usados en la mayoría deUsados en la mayoría de aerovias y como ayudas paraaerovias y como ayudas para la aproximación cuando estala aproximación cuando esta cerca de un aeropuerto.cerca de un aeropuerto.
- 39. Receptor: VOR - ILSReceptor: VOR - ILS AntenaAntena Panel de controlPanel de control Carátulas:Carátulas: VOR,HSI,RMIVOR,HSI,RMI
- 40. COM VOR NAVCOM VOR NAV SELECTOR/OBSSELECTOR/OBS
- 41. Omni Bearing Selector TO/FROM Indicator. (En este ejemplo esta en FROM) Two degree dots CDI (Course Deviation Indicator) Course Selected
- 42. RMI VOR HSI
- 43. CHEQUEO DEL VOR.CHEQUEO DEL VOR. 1.1. VOT (VOR Test Facility). Su ubicación y frecuencia puede ser encontrado en elVOT (VOR Test Facility). Su ubicación y frecuencia puede ser encontrado en el AirportAirport Facility Directory (A/FD)Facility Directory (A/FD) y en ely en el Air to Ground Communications Panel of the LowAir to Ground Communications Panel of the Low Altitude Enroute ChartAltitude Enroute Chart.. Al sintonizar la frecuencia el CDI se debe centrar en 0Al sintonizar la frecuencia el CDI se debe centrar en 0° (360°) FROM o 180° con° (360°) FROM o 180° con indicación TO. El máximo error permitido es ± 4°.indicación TO. El máximo error permitido es ± 4°.
- 44. 2.2. VOR Receivers Checkpoints seVOR Receivers Checkpoints se pueden encontrar en elpueden encontrar en el A/FDA/FD.. Con laCon la frecuencia apropiada sintonizada y elfrecuencia apropiada sintonizada y el OBS seleccionado con el radialOBS seleccionado con el radial publicado, el CDI se debe centrar conpublicado, el CDI se debe centrar con indicación de FROM cuando se esteindicación de FROM cuando se este sobre el punto de chequeo.sobre el punto de chequeo. En tierra la máxima tolerancia es deEn tierra la máxima tolerancia es de ±± 4°.4°. En vuelo la máxima tolerancia es de ±En vuelo la máxima tolerancia es de ± 6°.6°. 3.3. Si la aeronave tiene dos VORSi la aeronave tiene dos VOR’s (Dual’s (Dual VOR’S) se puede chequear el uno conVOR’S) se puede chequear el uno con el otro con una máxima tolerancia alel otro con una máxima tolerancia al tener sintonizada la misma radioayudatener sintonizada la misma radioayuda y radial es de ± 4°y radial es de ± 4° El piloto debe registrar la exactitud delEl piloto debe registrar la exactitud del instrumento en el libro de vuelo de lainstrumento en el libro de vuelo de la aeronave de la siguiente manera:aeronave de la siguiente manera: fecha, lugar, error de marcación si hayfecha, lugar, error de marcación si hay alguna y la firma respectiva.alguna y la firma respectiva.
- 45. Debido a que la señal puede ser captada a grandes altitudes, es posible que una aeronaveDebido a que la señal puede ser captada a grandes altitudes, es posible que una aeronave muestremuestre indicaciones erróneasindicaciones erróneas porqueporque el equipo puede recibir, simultáneamente, la señal de 2el equipo puede recibir, simultáneamente, la señal de 2 estaciones VOR que operen en la misma frecuenciaestaciones VOR que operen en la misma frecuencia; para evitar este riesgo, se recomienda que; para evitar este riesgo, se recomienda que las estaciones VOR que operen en la misma frecuencia se encuentren separadas por lo menoslas estaciones VOR que operen en la misma frecuencia se encuentren separadas por lo menos 500Nm.500Nm. Una gran ventaja de los VOR es que están libres de interferencia atmosférica y que puedenUna gran ventaja de los VOR es que están libres de interferencia atmosférica y que pueden transmitir a través del canal oral mucha información (ATIS).transmitir a través del canal oral mucha información (ATIS). El CDI se desplaza hacia donde este el radial que se quiere interceptar.El CDI se desplaza hacia donde este el radial que se quiere interceptar. El CDI se empezara a centrar 10El CDI se empezara a centrar 10° antes de llegar al radial deseado.° antes de llegar al radial deseado. TRAKING: Corregir, volver al radial.TRAKING: Corregir, volver al radial. Ambigüedad: 90° y 90° para cada lado desde el radial por el cual se esta procediendo para TO yAmbigüedad: 90° y 90° para cada lado desde el radial por el cual se esta procediendo para TO y FROM.FROM.
- 46. Chequeo zonas de ambigüedadChequeo zonas de ambigüedad Chequeo TO/FROMChequeo TO/FROM R: 220º R:130º R:310º 040 TO 220
- 47. NAVEGACION CON VORNAVEGACION CON VOR LA POSICIÓN Y DIRECCIÓN DEL AVIÓN DEPENDE DELLA POSICIÓN Y DIRECCIÓN DEL AVIÓN DEPENDE DEL RADIAL YRADIAL Y ELEL RUMBORUMBO MARCACIÓN TO:MARCACIÓN TO: CURSO Y RADIAL OPUESTOSCURSO Y RADIAL OPUESTOS MARCACIÓN FROM:MARCACIÓN FROM: CURSO Y RADIAL IGUALESCURSO Y RADIAL IGUALES RUMBO A LA ESTACIÓN RUMBO A LA ESTACIÓNRADIAL RADIAL
- 48. SECUENCIA PARA INTERCEPTARSECUENCIA PARA INTERCEPTAR ENTRANDO.ENTRANDO. • Visualizar el rumbo de interceptación.Visualizar el rumbo de interceptación. • Programar el radial deseado en la parteProgramar el radial deseado en la parte inferior del instrumento.inferior del instrumento. • Conservar el rumbo de interceptaciónConservar el rumbo de interceptación hasta que el CDI se centre.hasta que el CDI se centre. • Virar a la lectura de la parte superior delVirar a la lectura de la parte superior del instrumento.instrumento. SECUENCIA PARA INTERCEPTARSECUENCIA PARA INTERCEPTAR SALIENDO.SALIENDO. • Visualizar el rumbo de interceptación.Visualizar el rumbo de interceptación. • Programar el radial pedido en la parteProgramar el radial pedido en la parte superior del instrumento.superior del instrumento. • Conservar el rumbo de interceptaciónConservar el rumbo de interceptación hasta que el radial se centre.hasta que el radial se centre. • Virar a la lectura de la parte superior delVirar a la lectura de la parte superior del instrumento. (radial y rumbo soninstrumento. (radial y rumbo son iguales).iguales).
- 50. Homing:Homing: Se debe centrar elSe debe centrar el CDI (TO) y virar al rumboCDI (TO) y virar al rumbo que aparece en la parteque aparece en la parte superior del VOR (Curso).superior del VOR (Curso). Tracking:Tracking: Se corrige con elSe corrige con el doble de la desviación haciadoble de la desviación hacia el lado donde se encuentrael lado donde se encuentra el CDI. Para determinar lael CDI. Para determinar la desviación se observa ladesviación se observa la posición del CDI en laposición del CDI en la escala o se centra este paraescala o se centra este para así saber el radial al cual fueasí saber el radial al cual fue desplazada la aeronave.desplazada la aeronave.
- 51. • Indicador de carátula móvil (RMIIndicador de carátula móvil (RMI →→ Radio Magnetic Indicator). SlavedRadio Magnetic Indicator). Slaved Compass.Compass. Dos agujas para marcaciones deDos agujas para marcaciones de ADF o VOR según lo que se desee.ADF o VOR según lo que se desee. Se hacen lecturas de QDM y QDR.Se hacen lecturas de QDM y QDR. La aguja sencilla es mas usadaLa aguja sencilla es mas usada para la navegación con ADF y lapara la navegación con ADF y la doble con VOR.doble con VOR.
- 52. HSIHSI
- 54. El CDI se empieza a centrar 10 radiales antes del que se vaEl CDI se empieza a centrar 10 radiales antes del que se va a interceptar.a interceptar. El tiempo que se tarde para interceptar un radial dependeEl tiempo que se tarde para interceptar un radial depende de el ángulo de interceptación, la velocidad del avión y lade el ángulo de interceptación, la velocidad del avión y la distancia a la estación.distancia a la estación. A 60 NM de la estación hay 1 NM entre cada radial.A 60 NM de la estación hay 1 NM entre cada radial. EL VOR REACCIONA A LAS SEÑALES TRANSMITIDAS YEL VOR REACCIONA A LAS SEÑALES TRANSMITIDAS Y NO AL RUMBO DE LA AERONAVENO AL RUMBO DE LA AERONAVE
- 55. Distance Measuring Equipment (EquipoDistance Measuring Equipment (Equipo Medidor de distancia). Equipo de bajo costo yMedidor de distancia). Equipo de bajo costo y no se ve afectado por la estática (condicionesno se ve afectado por la estática (condiciones meteorológicas)meteorológicas) Gama de operación: 960 MHz a 1215 MHz.Gama de operación: 960 MHz a 1215 MHz. Confiabilidad de la señal: 199 NM, con unaConfiabilidad de la señal: 199 NM, con una exactitud de ½ milla o 3% de la distancia loexactitud de ½ milla o 3% de la distancia lo que sea mayor.que sea mayor. El mayor error de indicación del DME ocurreEl mayor error de indicación del DME ocurre cuando la aeronave esta muy cerca de lacuando la aeronave esta muy cerca de la estación a una altitud alta.estación a una altitud alta. La identificación del DME se repite cada 30La identificación del DME se repite cada 30 segundos en la misma frecuencia del VOR.segundos en la misma frecuencia del VOR. VOR/DME – VORTAC – ILS/DME –VOR/DME – VORTAC – ILS/DME – LOC/DMELOC/DME →→ Azimut y distancia.Azimut y distancia. MLSMLS →→ Range information by convencionalRange information by convencional DME indicators.DME indicators.
- 56. El equipo abordo interroga la estación enEl equipo abordo interroga la estación en tierra, esta responde y el equipo en latierra, esta responde y el equipo en la aeronave calcula el tiempo transcurrido paraaeronave calcula el tiempo transcurrido para dar la información en distancia.dar la información en distancia. El DME da distancia de inclinaciónEl DME da distancia de inclinación (Slant(Slant Range)Range) no distancia horizontal.no distancia horizontal. 1 NM por cada 6.000 ft.1 NM por cada 6.000 ft. El alcance máximo de un DME es de 200 NM.El alcance máximo de un DME es de 200 NM. Cunado esta asociado a un ILS el máximoCunado esta asociado a un ILS el máximo alcance es de 40 NM.alcance es de 40 NM. Debido a que las estaciones DME estánDebido a que las estaciones DME están asociadas con otras ayudas a la navegación,asociadas con otras ayudas a la navegación, no poseen una identificación propia.no poseen una identificación propia. Normalmente en las cartas deNormalmente en las cartas de radionavegación aparece el nombre de laradionavegación aparece el nombre de la radioayuda y el canal de la estación DMEradioayuda y el canal de la estación DME asociada. Por ejemplo en el VOR de Caliasociada. Por ejemplo en el VOR de Cali aparecerá:aparecerá: CALICALI VOR-DME-NDBVOR-DME-NDB 115.5115.5 210 CLO210 CLO 102-X ( Canal del DME )102-X ( Canal del DME )
- 57. HLD: Mantiene la marcacion DME de una estacion aunque se cambie la frecuencia.
- 58. Clasificación:Clasificación: Los equipos DME se pueden clasificarLos equipos DME se pueden clasificar según la aplicación se les dé, variandosegún la aplicación se les dé, variando por eso su alcance.por eso su alcance. a.a. DME de ruta con alcance efectivoDME de ruta con alcance efectivo hasta de 200 NM.hasta de 200 NM. b.b. DME para ILS-LOC con alcance hastaDME para ILS-LOC con alcance hasta de 40 NM.de 40 NM. c.c. DME/P de precisión, asociado al MLSDME/P de precisión, asociado al MLS con alcance hasta de 20 NM.con alcance hasta de 20 NM. La principal limitación del DME es queLa principal limitación del DME es que por transmitir en banda UHF sepor transmitir en banda UHF se propaga en línea recta y cualquierpropaga en línea recta y cualquier obstrucción oculta la señal y reduce elobstrucción oculta la señal y reduce el alcance en esa dirección.alcance en esa dirección. El equipo DME responde a todas lasEl equipo DME responde a todas las aeronaves que lo interrogan pero elaeronaves que lo interrogan pero el sistema tiene una capacidad limitada ysistema tiene una capacidad limitada y puede saturarse con lo cual puedepuede saturarse con lo cual puede eliminar la interrogación de aeronaveseliminar la interrogación de aeronaves lejanas.lejanas.
- 59. TIEMPO Y DISTANCIA A LATIEMPO Y DISTANCIA A LA ESTACIÓN (1)ESTACIÓN (1)
- 60. TIEMPO Y DISTANCIA A LATIEMPO Y DISTANCIA A LA ESTACIÓN (2)ESTACIÓN (2) Establecidos en un radial se vira una determinada cantidadEstablecidos en un radial se vira una determinada cantidad de grados y se mantiene dicho rumbo hasta interceptar unde grados y se mantiene dicho rumbo hasta interceptar un radial separado del actual por la misma cantidad deradial separado del actual por la misma cantidad de grados. De esta manera se forma un triángulo isóscelesgrados. De esta manera se forma un triángulo isósceles donde eldonde el tiempo entre radial y radial será el mismo tiempotiempo entre radial y radial será el mismo tiempo a la estacióna la estación y la distancia será dada por la formulay la distancia será dada por la formula Dist = Tiempo a la estación (min) x TAS (NM/min)Dist = Tiempo a la estación (min) x TAS (NM/min)
- 61. DME NDB/DME VOR/DME VORTAC
- 63. 1.1. AnticipoAnticipo →→ 1% de la velocidad.1% de la velocidad. Ejemplo: 130 KtsEjemplo: 130 Kts →→ 1% = 1.3 NM1% = 1.3 NM antes de la distancia a mantenerantes de la distancia a mantener durante el arco comienzo a virar.durante el arco comienzo a virar. 2.2. Viro a 90Viro a 90° de mi rumbo actual.° de mi rumbo actual. 3.3. Mantener abeam a la estación lasMantener abeam a la estación las agujas en el RMI revisandoagujas en el RMI revisando constantemente la distancia del arco.constantemente la distancia del arco. Cuando se hace en base alCuando se hace en base al instrumento del VOR, este se debeinstrumento del VOR, este se debe programar de 10° en 10° los radialesprogramar de 10° en 10° los radiales chequeando constantemente lachequeando constantemente la distancia del arco.distancia del arco.
- 64. Tactical Air Navigation (TACAN).Tactical Air Navigation (TACAN). VORTAC = VOR/DME.VORTAC = VOR/DME. Cumple las mismas funciones que elCumple las mismas funciones que el VOR – VOR/DME.VOR – VOR/DME. Radioayuda para el desarrollo deRadioayuda para el desarrollo de operaciones militares y navales, yaoperaciones militares y navales, ya que las radioayudas civiles no son lasque las radioayudas civiles no son las mas apropiadas.mas apropiadas. Ultrahigh Frecuency (UHF).Ultrahigh Frecuency (UHF). Se requiere tener a bordo de laSe requiere tener a bordo de la aeronave el equipo TACAN paraaeronave el equipo TACAN para poder recibir su señal, ya que elpoder recibir su señal, ya que el equipo VOR no lo puede hacer.equipo VOR no lo puede hacer.
- 68. Provee una senda exacta para la alineación y descenso de la aeronave en laProvee una senda exacta para la alineación y descenso de la aeronave en la aproximación final a la pista.aproximación final a la pista. El sistema esta dividido en tres partes:El sistema esta dividido en tres partes: 1.1. Guidance informationGuidance information:: Localizer, glide slope.Localizer, glide slope. 2.2. Range informationRange information:: Marker beacon, DME.Marker beacon, DME. 3.3. Visual InformationVisual Information:: Approach lights, touchdown and center line lights, runway lights.Approach lights, touchdown and center line lights, runway lights.
- 69. Este sistema es una ayuda deEste sistema es una ayuda de navegación de alta precisión ynavegación de alta precisión y confiabilidad como medio deconfiabilidad como medio de acercamiento a la pista en condicionesacercamiento a la pista en condiciones meteorológicas de vuelo pormeteorológicas de vuelo por instrumentos porque proporcionainstrumentos porque proporciona señales que permiten fijar la posición deseñales que permiten fijar la posición de la aeronave en acimut, elevación yla aeronave en acimut, elevación y distancia respecto a la pista.distancia respecto a la pista. Compass LocatorsCompass Locators localizados en ellocalizados en el marcador exterior (OM) o medio (MM)marcador exterior (OM) o medio (MM) pueden ser sustituidos porpueden ser sustituidos por markermarker beacons. DMEbeacons. DME, cuando este, cuando este especificado en el procedimiento, puedeespecificado en el procedimiento, puede ser sustituido por el OM.ser sustituido por el OM. Cuando el sistema ILS este instalado enCuando el sistema ILS este instalado en ambas pistas (Ejemplo: Rwy 36 – Rwyambas pistas (Ejemplo: Rwy 36 – Rwy 18) el sistema no estará operando18) el sistema no estará operando simultáneamente.simultáneamente. Identificación MorseIdentificación Morse →→ ““II”” ((∙ ∙∙ ∙)) transmitido en la frecuencia deltransmitido en la frecuencia del localizador.localizador.
- 71. Componente que provee guía lateral durante la aproximación final.Componente que provee guía lateral durante la aproximación final. Es un radiotransmisor VHF que transmite en 40 canales dentro del rango de frecuenciaEs un radiotransmisor VHF que transmite en 40 canales dentro del rango de frecuencia de 108.10 a 111.95 MHz.de 108.10 a 111.95 MHz. Approach Course = Front Course.Approach Course = Front Course. El transmisor y la antena del Localizador están alineados con el eje central de la pista yEl transmisor y la antena del Localizador están alineados con el eje central de la pista y situados a 700 Pies en la cabecera opuesta de la utilizada para la aproximación porsituados a 700 Pies en la cabecera opuesta de la utilizada para la aproximación por instrumentos.instrumentos. Back Course = Curso en dirección opuesta al curso de aproximación.Back Course = Curso en dirección opuesta al curso de aproximación.
- 72. El localizador provee guía de curso a través del descenso en la aproximación final con elEl localizador provee guía de curso a través del descenso en la aproximación final con el siguiente limite de cobertura:siguiente limite de cobertura: • A una distancia de 18 NM de la antena del localizador, y una altitud de 1000 ft sobre elA una distancia de 18 NM de la antena del localizador, y una altitud de 1000 ft sobre el obstáculo mas alto a lo largo de la línea de curso y 4.500 ft sobre la elevación del sitioobstáculo mas alto a lo largo de la línea de curso y 4.500 ft sobre la elevación del sitio donde esta ubicada la antena.donde esta ubicada la antena. • Off-course IndicactionsOff-course Indicactions →→ Areas angulares:Areas angulares: 1010° a lado y lado a 18 NM de la antena.° a lado y lado a 18 NM de la antena. De 10° a 35° a lado y lado a 10 NM de la antena.De 10° a 35° a lado y lado a 10 NM de la antena.
- 74. LOCALIZER APPROACH (NON-PRECISION APP) ILS APPROACH (PRECISION APP)
- 75. FRONT COURSE BACK COURSE Antes de realizar un procedimiento de aproximación de “Localizer Back Course”, este debe estar publicado y autorizado al igual que la aeronave y la tripulación. En el ejemplo si se aproxima con el Front Course las correcciones serán contrarias a las de una aproximación normal.
- 76. Opera dentro de los 40 canales del ILSOpera dentro de los 40 canales del ILS dentro del rango de frecuencia dedentro del rango de frecuencia de 329.15 MHz a 335.00 MHz en dirección329.15 MHz a 335.00 MHz en dirección deldel ““Front Course”Front Course” de la aproximación.de la aproximación. NOTA: Pueden existir falsas señales deNOTA: Pueden existir falsas señales de G/S al realizar una aproximaciónG/S al realizar una aproximación “Back“Back Course”Course”, por esto, al hacer una, por esto, al hacer una aproximación de este tipo se debenaproximación de este tipo se deben desatender estas indicaciones a menosdesatender estas indicaciones a menos que elque el “Glide Slope”“Glide Slope” este especificadoeste especificado en la carta de aproximación y aterrizaje.en la carta de aproximación y aterrizaje. El transmisor esta ubicado entre 750 ft yEl transmisor esta ubicado entre 750 ft y 1,250 ft del final de la aproximación (de1,250 ft del final de la aproximación (de la cabecera de la pista en uso) y dela cabecera de la pista en uso) y de 250ft a 650ft de la línea central de la250ft a 650ft de la línea central de la pista.pista. Provee información de descenso paraProvee información de descenso para llegar hasta el punto mas bajollegar hasta el punto mas bajo autorizado de la aproximaciónautorizado de la aproximación (Desicision Height(Desicision Height →→ DH).DH). UHF GLIDE PATH TRANSMITER
- 77. Opera dentro de los 40 canales del ILSOpera dentro de los 40 canales del ILS dentro del rango de frecuencia dedentro del rango de frecuencia de 329.15 MHz a 335.00 MHz en dirección329.15 MHz a 335.00 MHz en dirección deldel ““Front Course”Front Course” de la aproximación.de la aproximación. NOTA: Pueden existir falsas señales deNOTA: Pueden existir falsas señales de G/S al realizar una aproximaciónG/S al realizar una aproximación “Back“Back Course”Course”, por esto, al hacer una, por esto, al hacer una aproximación de este tipo se debenaproximación de este tipo se deben desatender estas indicaciones a menosdesatender estas indicaciones a menos que elque el “Glide Slope”“Glide Slope” este especificadoeste especificado en la carta de aproximación y aterrizaje.en la carta de aproximación y aterrizaje. El transmisor esta ubicado entre 750 ft yEl transmisor esta ubicado entre 750 ft y 1,250 ft del final de la aproximación (de1,250 ft del final de la aproximación (de la cabecera de la pista en uso) y dela cabecera de la pista en uso) y de 250ft a 650ft de la línea central de la250ft a 650ft de la línea central de la pista.pista. Provee información de descenso paraProvee información de descenso para llegar hasta el punto mas bajollegar hasta el punto mas bajo autorizado de la aproximaciónautorizado de la aproximación (Desicision Height(Desicision Height →→ DH).DH). UHF GLIDE PATH TRANSMITER
- 78. El ángulo normal de protección delEl ángulo normal de protección del “Glide Path”“Glide Path” es ajustado a 3es ajustado a 3° sobre el horizonte, para así° sobre el horizonte, para así intersectar elintersectar el MM (Medium Marker)MM (Medium Marker) a aproximadamente 200 ft y ela aproximadamente 200 ft y el OMOM ((Outer Marker)Outer Marker) a 1.400 fta 1.400 ft aproximadamente sobre la elevación de la pista.aproximadamente sobre la elevación de la pista. ElEl “Glide Slope”“Glide Slope” es utilizable a una distancia de 10 NM, aunque en algunas locaciones el este eses utilizable a una distancia de 10 NM, aunque en algunas locaciones el este es certificado para una mayor capacidad.certificado para una mayor capacidad. Se debe evitar al máximo volar por debajo delSe debe evitar al máximo volar por debajo del “Glide Path”“Glide Path” , para así poder estar libre de obstáculos., para así poder estar libre de obstáculos.
- 80. OUTER MARKEROUTER MARKER:: • Luz azul.Luz azul. • - - -- - - • De 4 a 7 NM del umbral.De 4 a 7 NM del umbral. MIDDLE MARKERMIDDLE MARKER:: • Luz ámbar.Luz ámbar. • - . - .- . - . • 3.500 ft del umbral.3.500 ft del umbral. INNER MARKERINNER MARKER:: • Luz blanca.Luz blanca. • . . . .. . . . • Entre el marcador medio y el umbralEntre el marcador medio y el umbral • ILS categoría II (esta ubicado en el DH del G/S de 100 ft) y ILS categoría III.ILS categoría II (esta ubicado en el DH del G/S de 100 ft) y ILS categoría III. BACK COURSE MARKERBACK COURSE MARKER:: • Luz blanca.Luz blanca. • .. .... ..
- 81. Radiofaros de baja potencia (M/F – L/F)Radiofaros de baja potencia (M/F – L/F) y que además de servir como referencia de pasoy que además de servir como referencia de paso sobre ellos, emiten señales que pueden ser seguidas para navegación e interpretadassobre ellos, emiten señales que pueden ser seguidas para navegación e interpretadas por el equipo indicador de radiofaro abordo (ADF).por el equipo indicador de radiofaro abordo (ADF). Normalmente ubicados en el OM y en el MM.Normalmente ubicados en el OM y en el MM. Tienen una potencia menor a 25 watts.Tienen una potencia menor a 25 watts. Rango de 15 NM, operando entre 190 y 535 KHz.Rango de 15 NM, operando entre 190 y 535 KHz. Transmiten en clave Morse las identificación del localizador de la siguiente forma:Transmiten en clave Morse las identificación del localizador de la siguiente forma: OMOM →→ Las primeras dos (2) letras. MMLas primeras dos (2) letras. MM →→ Las dos (2) ultimas letras.Las dos (2) ultimas letras.
- 82. CATEGORIA I:CATEGORIA I: DH = 200 ft / Runway Visual RangeDH = 200 ft / Runway Visual Range (RVR) = 2.400 ft (con luces de zona de(RVR) = 2.400 ft (con luces de zona de contacto y línea central de pista, RVRcontacto y línea central de pista, RVR de 1.800 ft).de 1.800 ft). CATEGORIA II:CATEGORIA II: DH = 100 ft / RVR = 1.200 ft.DH = 100 ft / RVR = 1.200 ft. CATEGORIA IIIa:CATEGORIA IIIa: No hay DH o DH por debajo de 100 ft /No hay DH o DH por debajo de 100 ft / RVR no menor a 700 ft.RVR no menor a 700 ft. CATEGORIA IIIb:CATEGORIA IIIb: No hay DH o DH por debajo de 50 ft /No hay DH o DH por debajo de 50 ft / RVR menor a 700 ft pero no menor aRVR menor a 700 ft pero no menor a 150 ft.150 ft. CATEGORIA IIIc:CATEGORIA IIIc: No hay DH / No hay limitación de RVR.No hay DH / No hay limitación de RVR.
- 86. LOCALIZER CRITICAL AREA:LOCALIZER CRITICAL AREA: • Vehículos y aeronaves no deben sobrepasarVehículos y aeronaves no deben sobrepasar la señal de la zona critica del localizadorla señal de la zona critica del localizador ( Hold Short of ILS critical área)( Hold Short of ILS critical área) cuando unacuando una aeronave arribando se encuentre entre elaeronave arribando se encuentre entre el Final Approach Fix del ILS y el aeropuerto.Final Approach Fix del ILS y el aeropuerto. • Vehículos y aeronaves no deben sobrepasarVehículos y aeronaves no deben sobrepasar la señal de la zona critica del localizadorla señal de la zona critica del localizador cuando el techo este menor a 200 ft y/o lacuando el techo este menor a 200 ft y/o la visibilidad sea 2.000 ft o menos y unavisibilidad sea 2.000 ft o menos y una aeronave se encuentre en el ILS MM.aeronave se encuentre en el ILS MM. GLIDE SLOPE CRITICAL AREA:GLIDE SLOPE CRITICAL AREA: • Vehículos y aeronaves no están autorizados aVehículos y aeronaves no están autorizados a entrar en esta área cuando una aeronaveentrar en esta área cuando una aeronave arribando se encuentre entre el Finalarribando se encuentre entre el Final Approach Fix del ILS y el aeropuerto, aApproach Fix del ILS y el aeropuerto, a menos que la aeronave reporte el campo a lamenos que la aeronave reporte el campo a la vista y tenga la posibilidad de circular hacia lavista y tenga la posibilidad de circular hacia la otra pista.otra pista. NOTA:NOTA: AUTOLAND o Aproximación AcopladaAUTOLAND o Aproximación Acoplada el ATC deberá garantizar que las zonasel ATC deberá garantizar que las zonas criticas del ILS estarán protegidas paracriticas del ILS estarán protegidas para cuando la aeronave se encuentre en el ILScuando la aeronave se encuentre en el ILS MM.MM. Hold Short of ILS critical áreaHold Short of ILS critical área
- 87. Para obtener la rata de descenso requerido para mantener una senda dePara obtener la rata de descenso requerido para mantener una senda de planeoplaneo (Glide Slope)(Glide Slope) de 3de 3° se utilizan dos (2) métodos:° se utilizan dos (2) métodos: • Ground Speed = 120 KtsGround Speed = 120 Kts 1.1. 120 x 5 = 600 fpm.120 x 5 = 600 fpm. 2.2. 120/2 = 60120/2 = 60 →→ a este resultado le agrego un cero (0)a este resultado le agrego un cero (0) →→ 600 fpm.600 fpm.
- 88. APPROACH LIGHT SYSTEM (ALS).APPROACH LIGHT SYSTEM (ALS). ALS en aproximaciones de precisión seALS en aproximaciones de precisión se extienden desde el umbral y el área deextienden desde el umbral y el área de aproximación 2,400 a 3.000 ftaproximación 2,400 a 3.000 ft En aproximaciones no precisiónEn aproximaciones no precisión →→ 1.400 a1.400 a 1.500 ft.1.500 ft. • Runway Edge Light SystemRunway Edge Light System (Luces de borde(Luces de borde de pista): Hight Intensity Runway Lightsde pista): Hight Intensity Runway Lights (HIRL) – (MIRL) – (LIRL). Son luces blancas,(HIRL) – (MIRL) – (LIRL). Son luces blancas, excepto en las pista instrumentos donde elexcepto en las pista instrumentos donde el amarillo reemplaza al blanco en los últimosamarillo reemplaza al blanco en los últimos 2.000 ft o la mitad de la pista lo que sea2.000 ft o la mitad de la pista lo que sea menor, formando así una zona de precauciónmenor, formando así una zona de precaución para el aterrizaje.para el aterrizaje. • Touchdown zone LightsTouchdown zone Lights (TDZL): Luces(TDZL): Luces blancas instaladas sobre la pista. Desde 100blancas instaladas sobre la pista. Desde 100 ft del umbral hasta 3.000 ft o la mitad de laft del umbral hasta 3.000 ft o la mitad de la pista lo que sea menor.pista lo que sea menor. • Runway Centerline LightsRunway Centerline Lights (RCLS): Ubicadas(RCLS): Ubicadas en intervalos de 50 ft, comienzan a 75 ft delen intervalos de 50 ft, comienzan a 75 ft del umbral de aterrizaje hasta 75 ft del contrario.umbral de aterrizaje hasta 75 ft del contrario. Son de color blanco hasta los últimos 3.000 ftSon de color blanco hasta los últimos 3.000 ft de la pista. Se intercalan entre blancas y rojasde la pista. Se intercalan entre blancas y rojas los últimos 2.000 ft, y los últimos 1.000 ft laslos últimos 2.000 ft, y los últimos 1.000 ft las luces de centro de pista son totalmente rojas.luces de centro de pista son totalmente rojas.
- 89. Runway Visual Range (RVR)Runway Visual Range (RVR):: • Es basado en lo que un piloto debe verEs basado en lo que un piloto debe ver hacia abajo abordo de un avión enhacia abajo abordo de un avión en movimiento al final de la aproximación.movimiento al final de la aproximación. • Cuenta con un transmisor ubicado cercaCuenta con un transmisor ubicado cerca de la pista, es utilizado para determinarde la pista, es utilizado para determinar los mínimos de visibilidad y/o lalos mínimos de visibilidad y/o la visibilidad predominante.visibilidad predominante. • En aeropuertos principales (USA)En aeropuertos principales (USA) pueden haber hasta tres (3)pueden haber hasta tres (3) transmisometrostransmisometros →→ Touchdown RVR /Touchdown RVR / Mid-RVRMid-RVR // Roll out-RVR.Roll out-RVR. • El RVR es actualizado cada minuto.El RVR es actualizado cada minuto.
- 90. TABLA RVR (VISIBILIDAD)TABLA RVR (VISIBILIDAD):: RVRRVR STST 1.600 1/41.600 1/4 2.400 (Nonprecision App) 1/22.400 (Nonprecision App) 1/2 3.2003.200 5/85/8 4.0004.000 3/43/4 4.5004.500 7/87/8 5.0005.000 11 6.0006.000 1 1/41 1/4
- 91. Sequenced Flashing lights (SFL)Sequenced Flashing lights (SFL):: También llamadas Luces indicadoras deTambién llamadas Luces indicadoras de alineamiento de pista (RAILalineamiento de pista (RAIL →→ RunwayRunway Aligment Indicator Lights), son de colorAligment Indicator Lights), son de color blanco-azul destellantes.blanco-azul destellantes. Runway End Identifier Lights (REIL)Runway End Identifier Lights (REIL):: Luz estroboscopica de alta intensidadLuz estroboscopica de alta intensidad ubicadas a cada lado de la pistaubicadas a cada lado de la pista marcando el final de esta.marcando el final de esta. Precision Approach Path IndicatorPrecision Approach Path Indicator (PAPI)(PAPI):: • Luces instaladas en una sola línea.Luces instaladas en una sola línea. • Senda de planeo calibrada a 3Senda de planeo calibrada a 3°.°. • Libre de obstáculos dentro de ± 10° aLibre de obstáculos dentro de ± 10° a partir de la línea central de la pista, y 4partir de la línea central de la pista, y 4 NM desde el umbral de la pista en uso.NM desde el umbral de la pista en uso. • 3 a 5 NM visibles durante el día, y3 a 5 NM visibles durante el día, y aproximadamente 20 NM en la noche.aproximadamente 20 NM en la noche.
- 92. Precision Approach Path Indicator (PAPI)Precision Approach Path Indicator (PAPI):: • Luces instaladas en una sola línea.Luces instaladas en una sola línea. • Senda de planeo calibrada a 3Senda de planeo calibrada a 3°.°. • Libre de obstáculos dentro de ± 10° a partir de la línea central de la pista, y 4 NM desdeLibre de obstáculos dentro de ± 10° a partir de la línea central de la pista, y 4 NM desde el umbral de la pista en uso.el umbral de la pista en uso. • 3 a 5 NM visibles durante el día, y aproximadamente 20 NM en la noche.3 a 5 NM visibles durante el día, y aproximadamente 20 NM en la noche. Threshold LightsThreshold Lights:: • Marcan el final de la pistaMarcan el final de la pista →→ Verde (comienzo) / Rojo (final).Verde (comienzo) / Rojo (final). PAPI LIGHTS THRESHOLD LIGHTS VASIS (Visual App Slope Indicator) LIGHTS
- 93. VISUAL APPROACH SLOPE INDICATOR
- 94. Cuando descender del DH o MDA en unCuando descender del DH o MDA en un procedimiento de aproximación porprocedimiento de aproximación por instrumentos?instrumentos? • Siempre y cuando se pueda continuar elSiempre y cuando se pueda continuar el descenso a una rata normal y aterrizar en ladescenso a una rata normal y aterrizar en la pista deseada utilizando maniobras normales.pista deseada utilizando maniobras normales. • La visibilidad de vuelo no es menor a laLa visibilidad de vuelo no es menor a la preescrita en el procedimiento depreescrita en el procedimiento de aproximación por instrumentos que se esteaproximación por instrumentos que se este utilizando.utilizando. • Cuando alguna de las siguientes referenciasCuando alguna de las siguientes referencias visuales es distigible e identificables para elvisuales es distigible e identificables para el piloto:piloto: ALSALS El umbral de la pista en uso.El umbral de la pista en uso. Las marcas o luces del umbral de la pista enLas marcas o luces del umbral de la pista en uso.uso. Marcas o luces de la zona de toma deMarcas o luces de la zona de toma de contacto (Touchdown Zone) de la pista encontacto (Touchdown Zone) de la pista en uso.uso. Marcas o luces de la pista en uso.Marcas o luces de la pista en uso. REIL (Runway End Identifier Lights)REIL (Runway End Identifier Lights) VASISVASIS
- 95. APROXIMACIONES DE PRECISIONAPROXIMACIONES DE PRECISION:: • Es una aproximación Standard en laEs una aproximación Standard en la cual se brinda información de senda decual se brinda información de senda de planeo (Glide Slope/Glide Path).planeo (Glide Slope/Glide Path). • ILS – MLS – PAR (Precision ApproachILS – MLS – PAR (Precision Approach Radar).Radar). APROXIMACIONES NO-PRECISIONAPROXIMACIONES NO-PRECISION:: • Es una aproximación Standard en laEs una aproximación Standard en la cual no se brinda información de sendacual no se brinda información de senda de planeo (Glide Slope/Glide Path).de planeo (Glide Slope/Glide Path). • VOR – GPS – TACAN – NDB – LOC –VOR – GPS – TACAN – NDB – LOC – ASR (Airport Surveillance Radar) – LDAASR (Airport Surveillance Radar) – LDA (Localizer Type Directional Aid) – SFD(Localizer Type Directional Aid) – SFD (Simplified Directional Facility).(Simplified Directional Facility).
- 96. Microwave Landing System (Sistema deMicrowave Landing System (Sistema de Aterrizaje por Microondas). Sistema deAterrizaje por Microondas). Sistema de aproximación de precisión.aproximación de precisión. Fue desarrollado para un futuroFue desarrollado para un futuro reemplazo del ILS.reemplazo del ILS. Provee guía de navegación de precisiónProvee guía de navegación de precisión para el alineamiento y el descenso depara el alineamiento y el descenso de las aeronaves en una aproximación paralas aeronaves en una aproximación para aterrizar proporcionándoles informaciónaterrizar proporcionándoles información de acimut, elevación y distancia.de acimut, elevación y distancia. A diferencia del ILS puede ser usadoA diferencia del ILS puede ser usado para aproximaciones que se inician enpara aproximaciones que se inician en un sitio que no esta alineado con laun sitio que no esta alineado con la pista designada para el aterrizaje.pista designada para el aterrizaje. Su identificación es por medio de tresSu identificación es por medio de tres letras en clave Morse precedidos por laletras en clave Morse precedidos por la letraletra ““MM”” (- -), para diferenciarlo de la(- -), para diferenciarlo de la identificación de aproximaciones ILSidentificación de aproximaciones ILS (letra(letra ““II”” ((∙ ∙∙ ∙) ).) ). MLS EQUIPMENT
- 97. Haz electrónico explorador que barre el área en sentido de las manecillas del reloj, hace una pausa, yHaz electrónico explorador que barre el área en sentido de las manecillas del reloj, hace una pausa, y luego lo hace en sentido inverso.luego lo hace en sentido inverso. La cobertura lateral es de 40 grados a cada lado del eje de la pista con un alcance mínimo de 20 NMLa cobertura lateral es de 40 grados a cada lado del eje de la pista con un alcance mínimo de 20 NM del umbral de la mismadel umbral de la misma.. En el sentido vertical tiene un alcance máximo de 20.000 ft con indicaciones de pendiente o ánguloEn el sentido vertical tiene un alcance máximo de 20.000 ft con indicaciones de pendiente o ángulo óptimo de aproximación desde 0.6 hasta 15 grados. La antena está localizada a 1000ft del extremo deóptimo de aproximación desde 0.6 hasta 15 grados. La antena está localizada a 1000ft del extremo de la pista instrumentos. El receptor de a bordo mide los intervalos de tiempo para calcular el acimut y lala pista instrumentos. El receptor de a bordo mide los intervalos de tiempo para calcular el acimut y la pendiente como guía de aproximación hacia la pista y desde ella en el caso de aproximaciónpendiente como guía de aproximación hacia la pista y desde ella en el caso de aproximación frustrada.frustrada.
- 98. Por lo tanto, el MLS provee cinco funciones:Por lo tanto, el MLS provee cinco funciones: 1.1. Guía acimutal de aproximación( alineación con el eje de pista).Guía acimutal de aproximación( alineación con el eje de pista). 2.2. Guía de navegación para aproximación frustrada.Guía de navegación para aproximación frustrada. 3.3. Indicación de pendiente de aproximación (desviación vertical sobre ángulo óptimo deIndicación de pendiente de aproximación (desviación vertical sobre ángulo óptimo de aproximación).aproximación). 4.4. Indicación de distancia.Indicación de distancia. Transmite en frecuencias UHF por medio de 200 canales en la banda de 5031 a 5090.6 MHz.Transmite en frecuencias UHF por medio de 200 canales en la banda de 5031 a 5090.6 MHz. Sistema propuesto por la OACI para el reemplazo del ILS (supuestamente lo debió haber sustituidoSistema propuesto por la OACI para el reemplazo del ILS (supuestamente lo debió haber sustituido en 1993), pero por su alto costo y el gran desarrollo de la navegación satelital existen muy pocasen 1993), pero por su alto costo y el gran desarrollo de la navegación satelital existen muy pocas instaladas actualmente.instaladas actualmente. MLS ELEVATION MLS AZIMUTH
- 100. MMLS (Mobile Microwave Landing System) MILITARY VERSION
- 102. VOR + TACAN = VORTAC.VOR + TACAN = VORTAC. Provee tres tipos de información:Provee tres tipos de información: a.a. VOR azimuth.VOR azimuth. b.b. TACAN azimuth.TACAN azimuth. c.c. TACAN distance (DME).TACAN distance (DME).
- 103. Simplified Directional Facility (SDF).Simplified Directional Facility (SDF). Provee el curso final de aproximaciónProvee el curso final de aproximación similar a la función del localizador ensimilar a la función del localizador en una aproximación ILS pero sin guía deuna aproximación ILS pero sin guía de senda de planeo (Glide S).senda de planeo (Glide S). Transmite señales en el rango deTransmite señales en el rango de 108.10 MHz a 111.95 MHz.108.10 MHz a 111.95 MHz. El curso en una aproximación SDFEl curso en una aproximación SDF puede no estar alineada con la pista,puede no estar alineada con la pista, resultando en una aproximación menosresultando en una aproximación menos precisaprecisa (Aproximación de no precisión(Aproximación de no precisión),), esta es la diferencia con la aproximaciónesta es la diferencia con la aproximación Standard Localizador.Standard Localizador.
- 104. Global Positioning System (GPS)Global Positioning System (GPS) • Sistema de navegación satelital que brindaSistema de navegación satelital que brinda información precisa de navegación, posición yinformación precisa de navegación, posición y tiempo (longitud, altitud y altitud).tiempo (longitud, altitud y altitud). • El sistema completo consta de 24 satélites enEl sistema completo consta de 24 satélites en la orbita terrestre (20.000 Km.) y 5 estacionesla orbita terrestre (20.000 Km.) y 5 estaciones en tierra que monitorean la operación normalen tierra que monitorean la operación normal de la constelación de satélites.de la constelación de satélites. Estación de Control Maestra: ColoradoEstación de Control Maestra: Colorado Springs, USA.Springs, USA. • La configuración permite de que al menos 5La configuración permite de que al menos 5 satélites puedan ser utilizados desdesatélites puedan ser utilizados desde cualquier punto de la Tierra durante las 24cualquier punto de la Tierra durante las 24 Horas del día.Horas del día. • Operado por el Departamento de Defensa deOperado por el Departamento de Defensa de EEUU (DOD).EEUU (DOD). • El uso del GPS como instrumento deEl uso del GPS como instrumento de aproximación por instrumentos es limitado alaproximación por instrumentos es limitado al espacio aéreo Norteamericano.espacio aéreo Norteamericano.
- 105. El GPS no puede reemplazar el altímetroEl GPS no puede reemplazar el altímetro barométrico como fuente principal debarométrico como fuente principal de información vertical.información vertical. Para volar IFR con el GPS este debe estarPara volar IFR con el GPS este debe estar expresamente autorizado por la FAA.expresamente autorizado por la FAA. La autoridad competente del país en dondeLa autoridad competente del país en donde opere la aeronave es que da la autorizaciónopere la aeronave es que da la autorización para usar el GPS para aproximacionespara usar el GPS para aproximaciones instrumentos.instrumentos. IFR no es permitido conIFR no es permitido con ““Handheld GPS”Handheld GPS”.. Precise Positioning Service (PPS):Precise Positioning Service (PPS): • Servicio prestado por el DOD a fuerzasServicio prestado por el DOD a fuerzas aliadas a EEUU.aliadas a EEUU. • Mayor precisión en la información dada.Mayor precisión en la información dada. Standard Positioning Service (SPS):Standard Positioning Service (SPS): • Operaciones civiles.Operaciones civiles. • 95% de exactitud horizontal dentro de95% de exactitud horizontal dentro de 100mts.100mts. • 99.99% de exactitud horizontal dentro de 30099.99% de exactitud horizontal dentro de 300 mtsmts.. PPS SPS
- 106. RECEIVER AUTONOMOUS INTEGRITYRECEIVER AUTONOMOUS INTEGRITY MONITORING (RAIM)MONITORING (RAIM):: • Es la forma en la que el GPS confirma laEs la forma en la que el GPS confirma la integridad (usabilidad) de las señalesintegridad (usabilidad) de las señales recibidas desde los satélites.recibidas desde los satélites. • Si el RAIM no esta disponible al realizar unaSi el RAIM no esta disponible al realizar una aproximación GPS, el piloto deberáaproximación GPS, el piloto deberá seleccionar otro tipo de aproximación en baseseleccionar otro tipo de aproximación en base a otra radioayuda.a otra radioayuda. Cuando se utilice GPS para la navegación yCuando se utilice GPS para la navegación y aproximaciones por instrumentos , elaproximaciones por instrumentos , el aeropuerto alterno debe tener unaeropuerto alterno debe tener un procedimiento por instrumentos aprobadoprocedimiento por instrumentos aprobado además del procedimiento GPS, y que esteademás del procedimiento GPS, y que este operacional y disponible al ETA.operacional y disponible al ETA. Un sistema GPS aprobado a bordo de unaUn sistema GPS aprobado a bordo de una aeronave puede reemplazar el INS u otroaeronave puede reemplazar el INS u otro sistema de navegación a larga distanciasistema de navegación a larga distancia requeridos para vuelos de rutas oceánicasrequeridos para vuelos de rutas oceánicas cortas.cortas. El sistema GPS abordo aprobado puedeEl sistema GPS abordo aprobado puede reemplazar uno de los dos INS requerido parareemplazar uno de los dos INS requerido para las rutas transoceánicas mas largas.las rutas transoceánicas mas largas.
- 108. RNAV: Área Navigation. Vuelo sin necesidad de radioayudas. Puede ser INS o GPS.
- 109. INERTIAL NAVIGATION SYSTEMINERTIAL NAVIGATION SYSTEM:: • Navegación autónoma (no requiereNavegación autónoma (no requiere ningún tipo de radioayuda) mas utilizadaningún tipo de radioayuda) mas utilizada por las aeronaves que realizan vuelospor las aeronaves que realizan vuelos sobre el océano (grandes distancias) .sobre el océano (grandes distancias) . • Utiliza giros, acelerómetros y unUtiliza giros, acelerómetros y un computador de navegación paracomputador de navegación para calcular la posición.calcular la posición. • Antes del vuelo, el piloto introduce laAntes del vuelo, el piloto introduce la latitud y longitud actual de la aeronave ylatitud y longitud actual de la aeronave y los puntos a seguir a lo largo de la ruta.los puntos a seguir a lo largo de la ruta. El INS esta constantementeEl INS esta constantemente actualizando su posición por medio deactualizando su posición por medio de las señales transmitidas desde los giroslas señales transmitidas desde los giros y acelerómetros.y acelerómetros. • Computa la dirección y distancia a losComputa la dirección y distancia a los puntos indicando esta información enpuntos indicando esta información en los instrumentos de navegación.los instrumentos de navegación. • Recibe información de rumbo y deRecibe información de rumbo y de velocidad, y puede computar el viento yvelocidad, y puede computar el viento y el ángulo de deriva.el ángulo de deriva. INERTIAL REFERENCE UNIT (IRU)
- 110. El procedimiento conocido como PT (Procedure turn) esEl procedimiento conocido como PT (Procedure turn) es utilizado para retornar hacia una estación (VOR o NDB)utilizado para retornar hacia una estación (VOR o NDB) por el mismo radial que se está abandonando esta.por el mismo radial que se está abandonando esta. Existen tres tipos de procedimientos de vuelta:Existen tres tipos de procedimientos de vuelta: 45º - 1 min – 180º45º - 1 min – 180º 90º-270º (80º-260º)90º-270º (80º-260º) Tear Drop (Gota)Tear Drop (Gota)
- 111. 45º - 1 min – 180º45º - 1 min – 180º Virar 45º con respecto alVirar 45º con respecto al radial de salida, mantenerradial de salida, mantener dicho rumbo durante undicho rumbo durante un minuto y luego virar, por elminuto y luego virar, por el lado contrario al virajelado contrario al viraje anterior, 180º y manteneranterior, 180º y mantener dicho rumbo hastadicho rumbo hasta interceptar de nuevo elinterceptar de nuevo el radial pero esta vez enradial pero esta vez en acercamientoacercamiento
- 112. 90º - 270º (80º - 260º)90º - 270º (80º - 260º) Virar 90º con respecto alVirar 90º con respecto al radial de salida, cuando seradial de salida, cuando se llegue a dicho rumbo se virallegue a dicho rumbo se vira por el lado contrario 270ºpor el lado contrario 270º para así interceptar depara así interceptar de nuevo el radial ennuevo el radial en acercamiento. Se le llamaacercamiento. Se le llama también 80º-260º por lostambién 80º-260º por los 10º de anticipo que se10º de anticipo que se deben considerar en losdeben considerar en los virajes.virajes.
- 113. GOTAGOTA Este procedimientoEste procedimiento también dirige detambién dirige de nuevo la aeronave a lanuevo la aeronave a la estación pero por unestación pero por un radial diferente al deradial diferente al de salida, siempre sesalida, siempre se especifica el radial oespecifica el radial o rumbo de salida y elrumbo de salida y el radial de regresoradial de regreso
- 114. AEROVIAAEROVIA:: Área de control o parte deÁrea de control o parte de ella dispuesta en forma de corredor yella dispuesta en forma de corredor y equipada con radioayudas para laequipada con radioayudas para la navegación.navegación. MEAMEA:: Minimum Enroute Altitude. Es laMinimum Enroute Altitude. Es la altitud mas baja entre dos radiofixesaltitud mas baja entre dos radiofixes publicados, y garantiza una adecuadapublicados, y garantiza una adecuada señal para la navegación y estar libre deseñal para la navegación y estar libre de obstáculos (2.000 ft en zonasobstáculos (2.000 ft en zonas montañosas y 1.000 ft en otras zonas).montañosas y 1.000 ft en otras zonas). MOCAMOCA:: Minimum ObstrucciónMinimum Obstrucción Clearance Altitude. Aparece en algunosClearance Altitude. Aparece en algunos segmentos de la ruta, su principalsegmentos de la ruta, su principal diferencia con el MEA es que el MOCAdiferencia con el MEA es que el MOCA asegura una señal de navegaciónasegura una señal de navegación confiable a solo 22 NM de la estación.confiable a solo 22 NM de la estación. NOTA:NOTA: El ATC solo autoriza el MOCAEl ATC solo autoriza el MOCA como altitud asignada cuando se este locomo altitud asignada cuando se este lo suficientemente cerca de la radioayuda.suficientemente cerca de la radioayuda.
- 115. MORAMORA:: Minimum Off-Route Altitude.Minimum Off-Route Altitude. Provee 1.000 ft sobre el obstáculo masProvee 1.000 ft sobre el obstáculo mas alto o estructura hecha por el hombre enalto o estructura hecha por el hombre en un cuadrante especifico.un cuadrante especifico. MAAMAA:: Maximum Authorized Altitude. EsMaximum Authorized Altitude. Es la mayor altitud a la que se puede volarla mayor altitud a la que se puede volar basado en la señal (line-of-sightbasado en la señal (line-of-sight transmiting distance) de estacionestransmiting distance) de estaciones VOR o VORTAC utilizando las mismasVOR o VORTAC utilizando las mismas frecuencias. El MAA asegura que se vafrecuencias. El MAA asegura que se va a recibir una sola señal de VOR a laa recibir una sola señal de VOR a la vez.vez. MRAMRA:: Minimum Reception Altitude. EsMinimum Reception Altitude. Es la altitud mas baja en la que se asegurala altitud mas baja en la que se asegura una adecuada recepción de las señalesuna adecuada recepción de las señales de navegación en donde se forma unade navegación en donde se forma una intersección (FIX) para mi navegación.intersección (FIX) para mi navegación. MAA – MCA – MRA – MOCA – MEAMAA – MCA – MRA – MOCA – MEA garantizan estar libre de obstáculosgarantizan estar libre de obstáculos 1.000 ft en zonas no montañosas y1.000 ft en zonas no montañosas y 2.000 ft en áreas montañosas.2.000 ft en áreas montañosas.
- 116. Procedimiento publicado para unProcedimiento publicado para un determinado aeropuerto para la llegadadeterminado aeropuerto para la llegada de aeronaves volando reglas de vuelode aeronaves volando reglas de vuelo por instrumentos (IFR).por instrumentos (IFR). Su objetivo es simplificar lasSu objetivo es simplificar las autorizaciones de llegada y facilitar laautorizaciones de llegada y facilitar la transición entre el vuelo en ruta y lostransición entre el vuelo en ruta y los procedimientos de aproximación porprocedimientos de aproximación por instrumentos.instrumentos.
- 117. Su objetivo principal es el mejoramiento del espacio aéreo, brindarle a las aeronaves seguridad conSu objetivo principal es el mejoramiento del espacio aéreo, brindarle a las aeronaves seguridad con respecto a los obstáculos (obstacle clearance) reinantes en el área.respecto a los obstáculos (obstacle clearance) reinantes en el área. Presentadas gráficamente y de forma textual.Presentadas gráficamente y de forma textual. Terminan en una intersección (FIX) o en alguna radioayuda.Terminan en una intersección (FIX) o en alguna radioayuda. La autorización para la realización de un SID es dada por el ATC.La autorización para la realización de un SID es dada por el ATC. GRADIENTEGRADIENTE:: Relación entre la altura ganada con la distancia recorrida.Relación entre la altura ganada con la distancia recorrida. • Vx: Best Angle SpeedVx: Best Angle Speed Cartas LEGIS: Multiplicando el gradiente por elCartas LEGIS: Multiplicando el gradiente por el Ground SpeedGround Speed durante el ascenso da comodurante el ascenso da como resultado la rata de ascenso requerida por el procedimiento.resultado la rata de ascenso requerida por el procedimiento. Cartas JEPPESEN: Se multiplica elCartas JEPPESEN: Se multiplica el Ground SpeedGround Speed durante el ascenso por los ft/min requeridos en eldurante el ascenso por los ft/min requeridos en el procedimiento, luego este resultados se divide por 60, este resultado es la rata requerida durante elprocedimiento, luego este resultados se divide por 60, este resultado es la rata requerida durante el ascenso.ascenso.
- 118. 1.1. INITIAL APPROACH SEGMENTINITIAL APPROACH SEGMENT:: • Provee un método de alineación de laProvee un método de alineación de la aeronave con el rumbo de aproximación.aeronave con el rumbo de aproximación. • Comienza en elComienza en el Initial Approach Fix (IAF)Initial Approach Fix (IAF) yy termina en eltermina en el Intermediate FixIntermediate Fix (IF)(IF) queque puede ser una intersección o radioayuda, sipuede ser una intersección o radioayuda, si el IAF no es una radioayuda el IF debeel IAF no es una radioayuda el IF debe serlo.serlo. 2.2. INTERMEDIATE APPROACH SEGMENTINTERMEDIATE APPROACH SEGMENT:: 1.1. Designado primariamente para posicionarDesignado primariamente para posicionar la aeronave en el descenso final.la aeronave en el descenso final. 2.2. Normalmente este segmento esta alineadoNormalmente este segmento esta alineado dentro de 30dentro de 30° del rumbo final del° del rumbo final del aproximación.aproximación. 3.3. Inicia en el Intermediate Fix (IF)Inicia en el Intermediate Fix (IF) y terminay termina en el segmento de aproximación finalen el segmento de aproximación final (Final(Final Approach Fix (FAF)).Approach Fix (FAF)). 4.4. Cuando elCuando el IFIF no es mostrado en la carta, elno es mostrado en la carta, el segmento intermedio es el punto donde sesegmento intermedio es el punto donde se esta alineado con el rumbo final deesta alineado con el rumbo final de aproximación (Inbound).aproximación (Inbound). NOTA: Para saber la rata de descenso en una aproximacion por instrumentos ILS con senda de planeo (G/S) de 3° se multiplica el Ground Speed por 5.
- 119. 3.3. FINAL APPROACH SEGMENTFINAL APPROACH SEGMENT:: • El propósito de este segmento esEl propósito de este segmento es permitir una navegación segura a unpermitir una navegación segura a un punto en el cual se debe decidirpunto en el cual se debe decidir continuar o no la aproximación para elcontinuar o no la aproximación para el aterrizaje.aterrizaje. • En una aproximación de precisiónEn una aproximación de precisión este segmento comienza en el puntoeste segmento comienza en el punto donde eldonde el Glide SlopeGlide Slope es capturado aes capturado a la altitud mínima para lala altitud mínima para la interceptación descrita en la carta.interceptación descrita en la carta. • En una aproximación de no precisiónEn una aproximación de no precisión comenzara tanto en el designadocomenzara tanto en el designado FAFFAF o en el punto donde se establecido eno en el punto donde se establecido en el rumbo final de aproximación.el rumbo final de aproximación.
- 120. 4.4. MISSED APPROACH SEGMENTMISSED APPROACH SEGMENT:: El objetivo de este segmento es permitirle al piloto navegar de forma segura a partir delEl objetivo de este segmento es permitirle al piloto navegar de forma segura a partir del punto de aproximación frustradapunto de aproximación frustrada (Missed Approach Point(Missed Approach Point →→ MAPt)MAPt) a un punto dondea un punto donde pueda hacer otro intento de aproximación o proceder a otro aeropuertopueda hacer otro intento de aproximación o proceder a otro aeropuerto
- 124. • Resumen práctico y específico del procedimiento de aproximación que se va a efectuar. • Se debe realizar antes de iniciar el descenso o máximo a 15 NM del IAF. • Antes de efectuarlo (Por el piloto no volando-PNF) se debe trasladar el control del avión al otro piloto (PNF) indicándole las condiciones del vuelo y el perfil de la ruta que debe continuar (Altitud, rumbo, radial, velocidad, etc.)
- 125. 1.1. INFORMACION AEROPUERTO (AERODROME DATA)INFORMACION AEROPUERTO (AERODROME DATA):: • Información relacionada con el aeropuerto como elevaciones , comunicaciones, tipo deInformación relacionada con el aeropuerto como elevaciones , comunicaciones, tipo de aproximación, etc.aproximación, etc. 2.2. VISTA DE PLANO (PLAN VIEW)VISTA DE PLANO (PLAN VIEW):: • Describe la aproximación dando información de radioayudas primarias y secundarias,Describe la aproximación dando información de radioayudas primarias y secundarias, altitudes, rumbos, cuadrantes de altitudes mínimas de sector en base a la radioayudaaltitudes, rumbos, cuadrantes de altitudes mínimas de sector en base a la radioayuda principal, etc.principal, etc. 3.3. VISTA DE PERFIL (PROFILE VIEW)VISTA DE PERFIL (PROFILE VIEW):: • Es la vista de lado del procedimiento de aproximación. Esta vista muestra las altitudesEs la vista de lado del procedimiento de aproximación. Esta vista muestra las altitudes mínimas y altitudes máximas en caso que exista un procedimiento de viraje, altitudes ymínimas y altitudes máximas en caso que exista un procedimiento de viraje, altitudes y distancias a cumplir sobre intersecciones y el procedimiento en caso de aproximacióndistancias a cumplir sobre intersecciones y el procedimiento en caso de aproximación frustrada.frustrada. 4.4. SECCION DE MINIMOS (MINIMUMS SECTION)SECCION DE MINIMOS (MINIMUMS SECTION):: • Mínimos operacionales para la aproximación a desarrollar (altitudes y alturas) según laMínimos operacionales para la aproximación a desarrollar (altitudes y alturas) según la categoría de la velocidad de aproximación de la aeronave (1.3 Stall Speed).categoría de la velocidad de aproximación de la aeronave (1.3 Stall Speed).
- 126. TTYPE OF APPROACHYPE OF APPROACH RRADIO AIDSADIO AIDS AALTITUDESLTITUDES SSTANDARD CALLTANDARD CALL OUTSOUTS MMISSED APPROACHISSED APPROACH PROCEDUREPROCEDURE TTYPE OF APPROACHYPE OF APPROACH RRADIO AIDSADIO AIDS AALTITUDESLTITUDES CCALL OUTSALL OUTS EESCAPESCAPE MANEUVERMANEUVER
- 127. BREAFING DE LA CARTABREAFING DE LA CARTA 1.1. Tipo de aproximación - Pista en la cual se va a desarrollar el procedimiento –Tipo de aproximación - Pista en la cual se va a desarrollar el procedimiento – Frecuencia ATC activa y Stand By.Frecuencia ATC activa y Stand By. 2.2. Radioayudas a programar.Radioayudas a programar. • Primaria: Radioayuda principal para la aproximación.Primaria: Radioayuda principal para la aproximación. • Secundaria: Radioayuda que no es la de mayor importancia, sin embargo esSecundaria: Radioayuda que no es la de mayor importancia, sin embargo es utilizada durante el procedimiento.utilizada durante el procedimiento. 3.3. Descripción del procedimiento a desarrollar incluyendo altitudes, distancias yDescripción del procedimiento a desarrollar incluyendo altitudes, distancias y tiempos que se vayan a utilizar durante el desarrollo de la aproximación.tiempos que se vayan a utilizar durante el desarrollo de la aproximación. 4.4. Standard Call Outs dependiendo del tipo de aproximacion.Standard Call Outs dependiendo del tipo de aproximacion. • Descripción del procedimiento de aproximación frustrada tal como apareceDescripción del procedimiento de aproximación frustrada tal como aparece en la carta.en la carta.
- 128. Call outs:Call outs: Aproximación de precisiónAproximación de precisión - 1000 ft Sobre el umbral1000 ft Sobre el umbral - 500 ft sobre el umbral500 ft sobre el umbral - 100 sobre mínimos100 sobre mínimos - MínimosMínimos - Campo a la vista o no (Posición)Campo a la vista o no (Posición) - Cualquier desviación del estándar de laCualquier desviación del estándar de la aproximaciónaproximación
- 129. Aproximación de no precisiónAproximación de no precisión - 1000 ft Sobre el umbral1000 ft Sobre el umbral - 100 sobre mínimos (MDA)100 sobre mínimos (MDA) - Mínimos (MDA)Mínimos (MDA) - Campo a la vista o no (Posición)Campo a la vista o no (Posición) - MAP ( En caso de no tener campo a la vista alMAP ( En caso de no tener campo a la vista al llegar a este se realiza sobrepaso)llegar a este se realiza sobrepaso) - Cualquier desviación del estándar de laCualquier desviación del estándar de la aproximaciónaproximación Call outs:Call outs:
- 132. Vat: Velocidad en el umbral a base de un valor de 1.3 veces la velocidad de perdida en configuración de aterrizaje con la masa de aterrizaje máxima certificada 166/210 Colombia
- 133. El sostenimiento es un procedimientoEl sostenimiento es un procedimiento necesario cuando no es posible dar lanecesario cuando no es posible dar la respectiva autorización a la aeronave derespectiva autorización a la aeronave de proceder a su destino final.proceder a su destino final. Standard = Virajes por la derecha.Standard = Virajes por la derecha. No Standard = Virajes por la izquierda.No Standard = Virajes por la izquierda. Se compone de dos virajes a nivel (180Se compone de dos virajes a nivel (180°° en 1 minuto)en 1 minuto) Todos los virajes se deben hacer con unTodos los virajes se deben hacer con un ángulo de inclinación lateral de 25° o laángulo de inclinación lateral de 25° o la velocidad angular de 3° por segundo, lovelocidad angular de 3° por segundo, lo que requiera la menor inclinación lateral.que requiera la menor inclinación lateral. Con aire en calma los tiempos aCon aire en calma los tiempos a verificar durante el alejamientoverificar durante el alejamiento (Outbound) y acercamiento (Inbound)(Outbound) y acercamiento (Inbound) será así:será así: A o por debajo de 14.000 ft = 1 minuto.A o por debajo de 14.000 ft = 1 minuto. Por encima de 14.000 ft = 1 minuto 30Por encima de 14.000 ft = 1 minuto 30 segundos.segundos.
- 134. VELOCIDADES DE SOSTENIMIENTO EN COLOMBIAVELOCIDADES DE SOSTENIMIENTO EN COLOMBIA:: • Hasta 14.000 ft e inclusive: 230 Kts (170 Kts para aeronaves categoría A y B) .Hasta 14.000 ft e inclusive: 230 Kts (170 Kts para aeronaves categoría A y B) . • 14.001 ft hasta e inclusive 20.000 ft : 240 Kts.14.001 ft hasta e inclusive 20.000 ft : 240 Kts. • 20.001 ft hasta e inclusive 34.000 ft : 265 kts.20.001 ft hasta e inclusive 34.000 ft : 265 kts. • 34.001 ft en adelante: 0.83 Mach.34.001 ft en adelante: 0.83 Mach. Tres (3) minutos o menos se debe iniciar la reducción de velocidad para llegar con laTres (3) minutos o menos se debe iniciar la reducción de velocidad para llegar con la velocidad de sostenimiento al iniciar el procedimiento.velocidad de sostenimiento al iniciar el procedimiento. Se debe chequear continuamente el tiempo para hacer las correcciones respectivasSe debe chequear continuamente el tiempo para hacer las correcciones respectivas durante eldurante el OutboundOutbound
- 135. Velocidades de sostenimiento en USA
- 137. PARALELO (110°) ENTRADA POR LA CABEZA DIRECTA (180°) ENTRADA POR EL CUERPO DIRECTA (180°) ENTRADA POR EL CUERPO GOTA (070°) ENTRADA POR LA RADIAYUDA NOTA: La Zona de Flexibilidad es de 5° es el posible limite entre dos tipos de incorporación en donde el piloto tiene la potestad de escoger la forma de entrar al patrón de espera. 1. Directo. 2. Gota. 3. Paralelo. NOTA: Chequear tiempo en el Outbound cuando se este a 090° (abeam) de la estación o cuando el VOR cambie de TO a FROM. NOTA: El rumbo de Entrada (Inbound) se debe De programar así; • Directo: Al hacer el viraje hacia el Outbound. • Gota: Al hacer la corrección de 030° al rumbo. • Paralelo: Cuando se este volando el Inbound inicialmente.
- 138. ENTRADA DIRECTAENTRADA DIRECTA:: • 090090° a lado y lado del radial de sostenimiento (Inbound) dando una cobertura de 180° en° a lado y lado del radial de sostenimiento (Inbound) dando una cobertura de 180° en total.total. • Al cruzar la estación se vira en el mismo sentido del procedimiento (Standard o NoAl cruzar la estación se vira en el mismo sentido del procedimiento (Standard o No Standard).Standard). • Virar y hacer traking (VOR) o homing (ADF).Virar y hacer traking (VOR) o homing (ADF). DIRECTO DIRECTO PARALELO GOTA
- 139. ENTRADA EN GOTAENTRADA EN GOTA:: • Entrada por la radioayuda, se le suma o resta 070Entrada por la radioayuda, se le suma o resta 070° al° al InboundInbound dependiendo de la dirección deldependiendo de la dirección del patrón (Standard o No Standard).patrón (Standard o No Standard). • Al cruzar sobre la estación se debe sumar o restar 030° alAl cruzar sobre la estación se debe sumar o restar 030° al OutboundOutbound dependiendo de lo siguiente:dependiendo de lo siguiente: Standard = Restar 030° alStandard = Restar 030° al OutboundOutbound.. No Standard = Sumar 030° alNo Standard = Sumar 030° al OutboundOutbound.. Se debe volar este rumbo por 1 minuto, luego virar en sentido del circuito de espera para volar haciaSe debe volar este rumbo por 1 minuto, luego virar en sentido del circuito de espera para volar hacia la estación (Traking con VOR o Homing con ADF).la estación (Traking con VOR o Homing con ADF). DIRECTO DIRECTOPARALELO GOTA
- 140. ENTRADA PARALELAENTRADA PARALELA:: • Entrada por la cabeza del circuito. Se toma el rumbo de entrada (Entrada por la cabeza del circuito. Se toma el rumbo de entrada (InboundInbound) y se le suma) y se le suma o resta 110o resta 110° dependiendo del sentido del circuito de espera (Standard o No Standard).° dependiendo del sentido del circuito de espera (Standard o No Standard). • Al cruzar la estación toma el rumbo de salida (Al cruzar la estación toma el rumbo de salida (OutboundOutbound) chequeando 1 minuto, luego) chequeando 1 minuto, luego hacer viraje en sentido contrario a los virajes descritos en el procedimiento parahacer viraje en sentido contrario a los virajes descritos en el procedimiento para finalmente volar hacia la estación (Traking con VOR o Homing con ADF).finalmente volar hacia la estación (Traking con VOR o Homing con ADF). • Nótese que en este tipo de incorporación es posible estar por un momento por fuera delNótese que en este tipo de incorporación es posible estar por un momento por fuera del área de maniobra del circuito.área de maniobra del circuito. DIRECTO DIRECTO PARALELO GOTA
- 141. • El cronometraje de tiempo del OUTBOUND empieza cuando la aeronave seEl cronometraje de tiempo del OUTBOUND empieza cuando la aeronave se encuentra ABEAM a la estación cuando el circuito se realiza con respecto aencuentra ABEAM a la estación cuando el circuito se realiza con respecto a una radioayuda, o se empieza a cronometrar cuando se tienen planos a niveluna radioayuda, o se empieza a cronometrar cuando se tienen planos a nivel luego de finalizar el viraje a OUTBOUND cuando se realiza el circuito conluego de finalizar el viraje a OUTBOUND cuando se realiza el circuito con respecto a un FIX.respecto a un FIX. • ABEAM:ABEAM: Es cuando se encuentra la estación a 90º (Radial perpendicular alEs cuando se encuentra la estación a 90º (Radial perpendicular al radial de sostenimiento)radial de sostenimiento) • Cuado se realiza el circuito de espera con VOR se debe programar el rumboCuado se realiza el circuito de espera con VOR se debe programar el rumbo INBOUNDINBOUND en la parte superior de la carátula (Curso a la estación). El ABEAMen la parte superior de la carátula (Curso a la estación). El ABEAM se presenta cuando pasa la marcación dese presenta cuando pasa la marcación de FROMFROM aa TO.TO. La altitud mínima de sostenimiento se conoce como MHALa altitud mínima de sostenimiento se conoce como MHA
- 142. • Una aeronave se considera incorporada al circuito cuando cruceUna aeronave se considera incorporada al circuito cuando cruce la estación porla estación por segundasegunda vez.vez. •Existen 5º de tolerancia a lado y lado de cada uno de los radialesExisten 5º de tolerancia a lado y lado de cada uno de los radiales límites sobre los cuales se puede cambiar o no la forma delímites sobre los cuales se puede cambiar o no la forma de incorporación. Las preferencias en el momento de laincorporación. Las preferencias en el momento de la incorporación son: Entre Gota y Directoincorporación son: Entre Gota y Directo GOTAGOTA, entre Gota y, entre Gota y ParaleloParalelo GOTAGOTA y entre Paralelo y Directoy entre Paralelo y Directo DIRECTODIRECTO ..
- 143. TIPOS DE PROCEDIMIENTOS DE ESPERATIPOS DE PROCEDIMIENTOS DE ESPERA:: • Sobre una radioayuda.Sobre una radioayuda. • Sobre un radial.Sobre un radial. • Con DME.Con DME. • Sobre un FIX (Intersección).Sobre un FIX (Intersección). • Imaginarios (sobre una emisora).Imaginarios (sobre una emisora).
- 144. Sobre una radioayuda
- 145. Sobre una radioayuda
- 146. Sostenimiento sobre un FIX
- 147. Sobre un FIX. Circuito publicado o no.
- 148. Sostenimiento sobre un radial y DME