Descargado 90 veces



![9
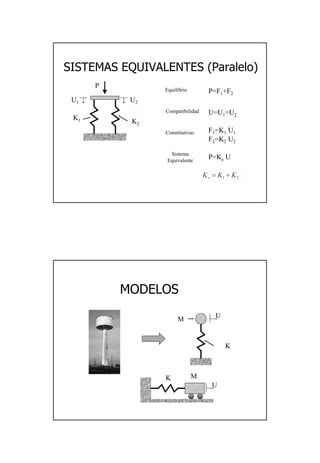
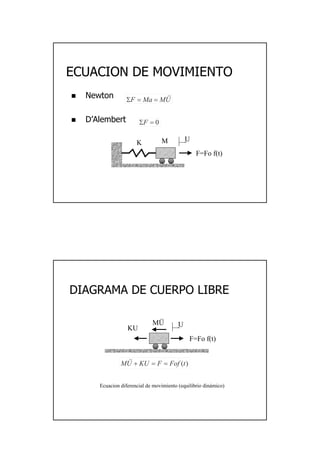
VIBRACION LIBREVIBRACION LIBRE
0=+ KUUM &&
Solución de la ecuacion diferencial de movimiento
K M U
U = UG
U = UG = A sen(ωt) + B cos (ωt)
Ü = - ω2 [A sen(ωt) + B cos (ωt)]
(- M ω2 + Κ ) (A sen(ωt) + B cos (ωt) ) = 0
PROPIEDADES DINAMICASPROPIEDADES DINAMICAS
M
K
=ωFrecuencia circular de vibración
K M U
K
M
T π
ω
π
2
2
==Periodo natural de vibración
T
f
1
=Frecuencia natural de vibración (Hertz, Hz, 1/seg)
(seg)
(rad/seg)](https://image.slidesharecdn.com/antisismica-dinamica-estructural-ingsalinas-140719203447-phpapp01/85/Antisismica-dinamica-estructural-ing-salinas-9-320.jpg)
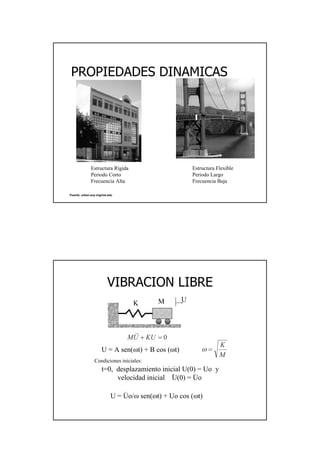


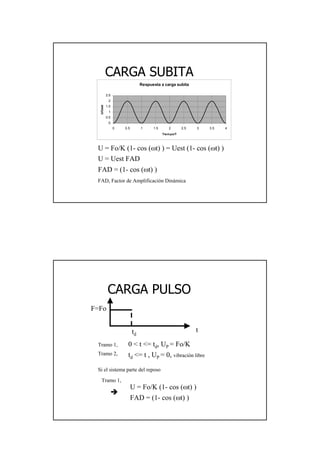










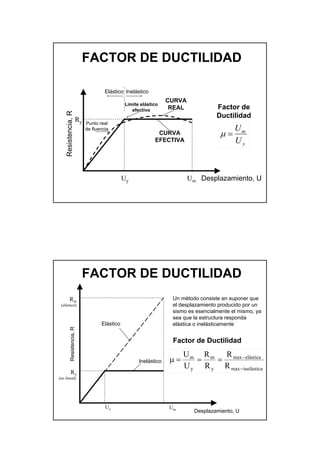
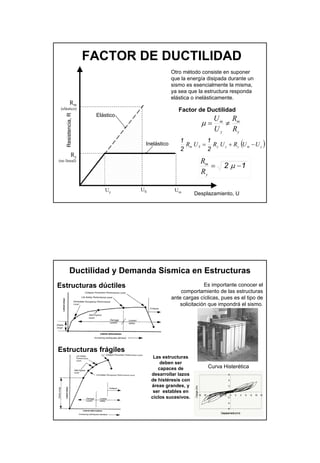

Este documento presenta una introducción a la dinámica estructural. Explica que la dinámica estructural estudia el comportamiento y características de las estructuras debido a cargas dinámicas que varían en el tiempo, como sismos o viento. Luego describe los sistemas de un grado de libertad, la rigidez, masa y ecuaciones de movimiento que rigen la vibración libre y forzada de dichos sistemas. Finalmente, analiza diferentes tipos de excitaciones como cargas subitas, pulsos y rampas, y























































































