El documento describe los sistemas de control y la transformada de Laplace. Los sistemas de control son importantes en diversos sectores como la industria, el transporte y el hogar para lograr objetivos de manera segura y exacta. La transformada de Laplace es una herramienta matemática útil para analizar sistemas dinámicos lineales mediante la conversión de ecuaciones diferenciales en ecuaciones algebraicas.





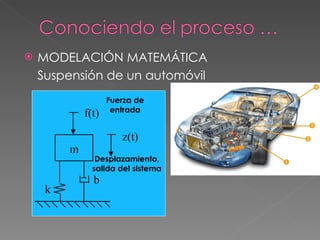
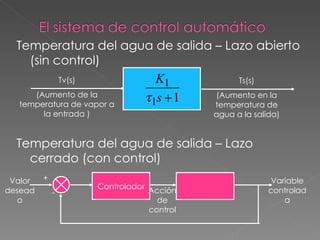
![Suspensión de un automóvil
dz (t ) d 2 z (t )
f (t ) − kz (t ) − b =m
dt dt 2
Aplicando la transformada de Laplace a cada término
(considerando condiciones iniciales igual a cero)
F ( s ) − kZ ( s ) − bsZ ( s ) = ms 2 Z ( s )
[
F ( s ) = Z ( s ) ms 2 + bs + k ]
Z ( s) 1
= Función de
F ( s ) ms 2 + bs + k transferencia](https://image.slidesharecdn.com/aplicacioneslatransformadadelaplaceparaelgrupo-090712193844-phpapp02/85/Aplicaciones-La-Transformada-De-Laplace-10-320.jpg)

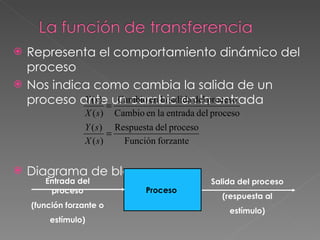
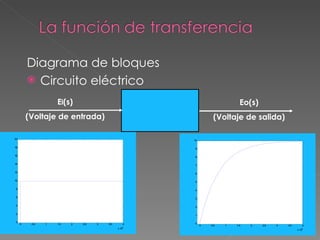
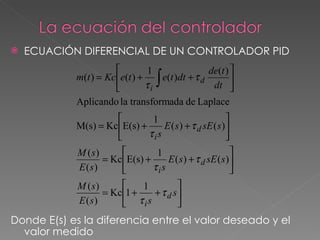
![Circuito eléctrico
di (t ) 1 1
ei (t ) = L
dt
+ Ri (t ) + ∫C
i (t )dt
C ∫i (t )dt = eo (t )
Aplicando la transformada de Laplace
1 1
E i ( s ) = LsI ( s ) + RI ( s ) + I (s) I ( s ) = Eo ( s )
Cs Cs
Combinando las ecuaciones (despejando para I(s))
1
E i ( s ) = Ls[ CsEo ( s )] + R[ CsEo ( s )] + [ CsEo ( s)]
Cs
[
E i ( s ) = Eo ( s ) LCs 2 + RCs + 1 ]
Eo ( s ) 1 Función de
=
Ei ( s ) LCs 2 + RCs + 1 transferencia](https://image.slidesharecdn.com/aplicacioneslatransformadadelaplaceparaelgrupo-090712193844-phpapp02/85/Aplicaciones-La-Transformada-De-Laplace-12-320.jpg)





















































![Transformada de laplace_1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/transformadadelaplace11-110907232804-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


















