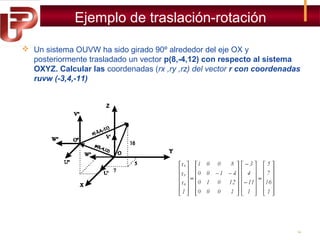
Descargado 312 veces
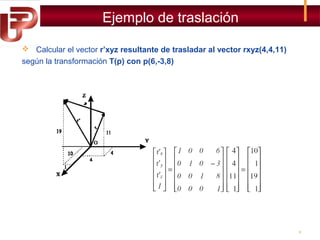
![Ejemplo de rotación
Según la figura el sistema OUVW se encuentra girado -90º alrededor
del eje OZ con respecto al sistema OXYZ. Calcular las coordenadas
del vector r si r = [4,8,12]T
11](https://image.slidesharecdn.com/05cinematica2-131218112212-phpapp02/85/Robotica-cinematica2-11-320.jpg)
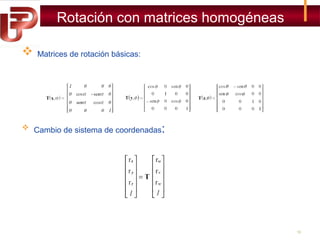
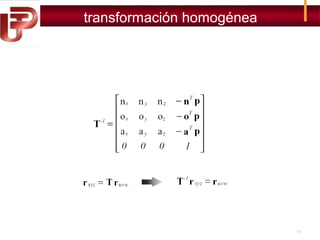
![Significado geométrico matrices
n,o,a => terna ortonormal que representa la orientación
p =>vector que representa la posición
||n||=||o||=||a||=1
nxo=a
[n o a]-1=[n o a]T
16](https://image.slidesharecdn.com/05cinematica2-131218112212-phpapp02/85/Robotica-cinematica2-16-320.jpg)

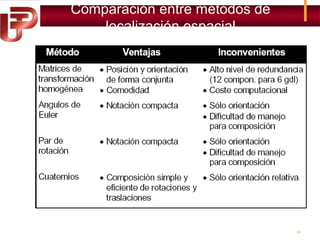

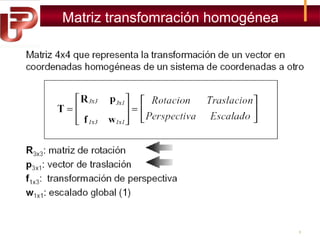
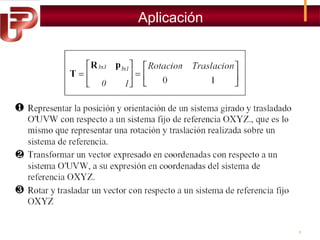
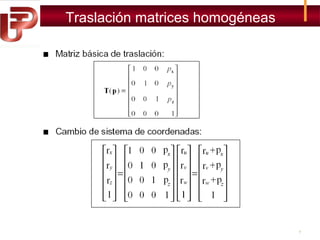
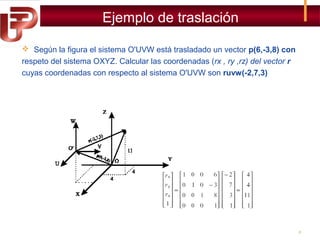
Este documento describe diferentes métodos para representar la posición y orientación de sistemas de coordenadas, incluyendo pares de rotación, cuaterniones, coordenadas homogéneas y matrices de transformación homogénea. También explica cómo usar estas representaciones para realizar transformaciones como traslaciones y rotaciones, así como ejemplos de su aplicación.

























































































