
Recomendados
Más contenido relacionado
Similar a clase_4_analisis_de_velocidad_ Mecanismos.pptx
Similar a clase_4_analisis_de_velocidad_ Mecanismos.pptx (20)
Último
Último (20)
clase_4_analisis_de_velocidad_ Mecanismos.pptx
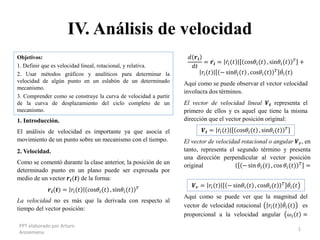
- 1. IV. Análisis de velocidad Objetivos: 1. Definir que es velocidad lineal, rotacional, y relativa. 2. Usar métodos gráficos y analíticos para determinar la velocidad de algún punto en un eslabón de un determinado mecanismo. 3. Comprender como se construye la curva de velocidad a partir de la curva de desplazamiento del ciclo completo de un mecanismo. PPT elaborado por Arturo Arosemena 1 1. Introducción. El análisis de velocidad es importante ya que asocia el movimiento de un punto sobre un mecanismo con el tiempo. 2. Velocidad. Como se comentó durante la clase anterior, la posición de un determinado punto en un plano puede ser expresada por medio de un vector 𝒓𝒊(𝒕) de la forma: 𝒓𝒊(𝒕) = ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 La velocidad no es más que la derivada con respecto al tiempo del vector posición: 𝑑 𝒓𝒊 𝑑𝑡 = 𝒓𝒊 = ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 + ) 𝑟𝑖(𝑡 − sin ) 𝜃𝑖(𝑡 , cos ) 𝜃𝑖(𝑡 𝑇 𝜃𝑖(𝑡) Aquí como se puede observar el vector velocidad involucra dos términos. El vector de velocidad lineal 𝑽𝒕 representa el primero de ellos y es aquel que tiene la misma dirección que el vector posición original: 𝑽𝒕 = ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 El vector de velocidad rotacional o angular 𝑽𝒓, en tanto, representa el segundo término y presenta una dirección perpendicular al vector posición original ( − sin 𝜃𝑖(𝑡) , cos 𝜃𝑖(𝑡) 𝑇 = 𝑽𝒓 = ) 𝑟𝑖(𝑡 − sin ) 𝜃𝑖(𝑡 , cos ) 𝜃𝑖(𝑡 𝑇 𝜃𝑖(𝑡 Aquí como se puede ver que la magnitud del vector de velocidad rotacional 𝑟𝑖(𝑡) 𝜃𝑖(𝑡) es proporcional a la velocidad angular 𝜔𝑖 𝑡 =
- 2. IV. Análisis de velocidad 2 Velocidad relativa 2. Velocidad. Recuerde las unidades en las cuales típicamente se presenta la velocidad: 𝑆𝐼 → m s 𝑆𝑖𝑠𝑡𝑒𝑚𝑎 𝐼𝑛𝑔𝑙é𝑠 → ft s En tanto que la velocidad angular 𝜔 𝑡 suele presentar unidades de grados o radianes por unidad de tiempo. Ocasionalmente también se puede presentar en número de revoluciones por unidad de tiempo. 1 rev = 2π rad El movimiento relativo es aquel que consiste en la diferencia de movimiento entre dos puntos. La velocidad relativa es aquella asociada a dicho movimiento relativo. En este ejemplo la velocidad relativa del punto B con respecto al punto A, sería aquella velocidad que presenta el punto B visto desde el punto A. 𝑽𝑩 𝑨 = 𝑽𝑩 −> 𝑽𝑨
- 3. IV. Análisis de velocidad 3 3. Se determinan las incógnitas gráficamente a partir del polígono resultante. 3. Análisis gráfico de velocidad. Método de velocidades relativas Recuerde que aun cuando emplee métodos gráficos solo puede tener dos incógnitas. Aquí se puede emplear puntualmente el siguiente procedimiento: 1. Se dibujan los vectores de velocidad cuya magnitud y dirección es conocida. 2. Se dibujan los vectores de velocidad relativa. Tenga en cuenta que un vector de velocidad relativa es perpendicular a la línea que une los dos puntos involucrados en el movimiento relativo.
- 4. IV. Análisis de velocidad 4 La localización de los centros instantáneos en primera instancia se logra a través de las siguientes reglas: 3. Análisis gráfico de velocidad. Método del centro instantáneo de rotación El centro instantáneo de rotación es aquel punto en torno al cual un eslabón, con independencia de la complejidad de su movimiento, instantáneamente aparenta estar en rotación pura. Producto de que cada eslabón tiene un centro instantáneo con cada uno de los otros eslabones, un mecanismo en particular tendrá varios centros instantáneos. El número total de centros instantáneos se relaciona con el número 𝑛 de eslabones de la siguiente manera: 𝑁ú𝑚𝑒𝑟𝑜 𝑡𝑜𝑡𝑎𝑙 𝑑𝑒 𝑐𝑒𝑛𝑡𝑟𝑜𝑠 𝑖𝑛𝑠𝑡𝑎𝑛𝑡á𝑛𝑒𝑜𝑠 = 𝑛 𝑛 − 1 2 -Cuando dos eslabones están conectados por una junta rotatoria, el centro instantáneo que relaciona a esos dos eslabone está en la junta. -El centro instantáneo de dos eslabones en contacto rodante sin deslizamiento está localizado en el punto de contacto.
- 5. IV. Análisis de velocidad 5 3. Análisis gráfico de velocidad. Método del centro instantáneo de rotación -El centro instantáneo de dos eslabones en contacto por medio de una junta de deslizamiento está en el infinito, en una dirección perpendicular a la del deslizamiento. Recuerde que un movimiento deslizante puede ser visualizado como un movimiento rodante en donde el radio desde el punto de pivote es infinitamente largo. -El centro instantáneo de dos eslabones que presentan un movimiento deslizante general debe encontrarse a lo largo de la línea normal a la dirección de contacto deslizante. En caso tal de que las reglas anteriores no le hayan permitido encontrar todos los centros instantáneos debe usar el teorema de Kennedy: “Los tres centros instantáneos correspondientes con tres cuerpos (eslabones) todos se encuentran sobre la misma recta”. Es decir los centros instantáneos son colineales.
- 6. IV. Análisis de velocidad 6 3. Análisis gráfico de velocidad. Método del centro instantáneo de rotación Considere el siguiente ejemplo donde se dibuja el diagrama de centros instantáneos y se encuentran dichos centros. Ahora bien, el análisis gráfico del método de centros instantáneos se basa en tres principios: I. La magnitud del vector velocidad rotacional de un cuerpo rígido es proporcional a su velocidad angular y a la distancia desde el punto pivote hasta un determinado punto de interés en ese cuerpo.
- 7. IV. Análisis de velocidad 7 3. Análisis gráfico de velocidad. Método del centro instantáneo de rotación II. El centro instantáneo que es común para dos eslabones puede ser considerado se encuentra sobre cualquier de los dos eslabones. III. La velocidad absoluta de un punto, que sirve como centro instantáneo de rotación, es siempre la misma. El método general en sí consiste en seguir los siguientes pasos: -Identificar el eslabón con la velocidad conocida, el eslabón que contiene el punto cuya velocidad es deseada, y el eslabón que constituye el marco de referencia. -Localizar el centro instantáneo correspondiente al eslabón de velocidad conocida y al marco. -Localizar el centro instantáneo correspondiente al eslabón de velocidad conocida y al eslabón de velocidad deseada. -Determinar la velocidad del centro instantáneo correspondiente al eslabón de velocidad conocida y al eslabón de velocidad deseada. Esto último se hace al escalar la velocidad conocida. -Localizar el centro instantáneo correspondiente al eslabón que contiene el punto cuya velocidad es deseada y al marco de referencia. -Determinar la velocidad deseada. Esto último se hace al escalar la velocidad del centro instantáneo recientemente determinada. Para poder escalar las velocidades se deben definir dos líneas. La línea de centros (𝐿𝐶) es una línea que se dibuja desde el punto pivote del eslabón hasta el punto donde inicia el vector conocido. La línea de proporción (𝐿𝑃). Es una línea que se dibuja desde el punto pivote hasta el punto donde finaliza el vector conocido.
- 8. IV. Análisis de velocidad 8 3. Análisis gráfico de velocidad. Método del centro instantáneo de rotación Para facilitar la comprensión del método considere el siguiente ejemplo, en donde se conoce la magnitud del vector velocidad rotacional del eslabón 2 en el punto correspondiente a la junta B (punto que también corresponde al centro instantáneo (23)).
- 9. IV. Análisis de velocidad 9 4. Análisis analítico de velocidad. Método de triangulo empleando el concepto de velocidad relativas Al igual que en el análisis de posición, una vez se han dibujado los polígonos correspondientes a los vectores de las velocidades absolutas y relativas se puede emplear el método del triángulo para dar solución al problema, siempre y cuando solo se tengan dos incógnitas. Vea ejemplos 6.9 y 6.10 del libro de texto. Método de triangulo empleando el concepto del centro instantáneo de rotación Los centros instantáneos pueden ser determinados a través de la construcción de polígonos constituidos de triángulos rectos y oblicuos. El análisis de velocidad respectivo también puede llevarse a cavo empleando el método de triángulos. Para más detalles vea el ejemplo 6.16 de su libro de texto. Método de las ecuaciones de laso cerrado 𝑖=1 𝑛 𝒓𝒊 = 0 𝑑 𝑑𝑡 𝑖=1 𝑛 𝒓𝒊 = 𝑖=1 𝑛 𝒓𝒊 = 0 Por lo tanto: 𝑖=1 𝑛 ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 Donde 𝑛 es el número total de vectores. a) Primer caso: se desconoce la magnitud del vector de velocidad lineal 𝑟𝑗(𝑡) y la velocidad angular 𝜔𝑗 𝑡 correspondientes al vector posición 𝑟𝑗(𝑡).
- 10. IV. Análisis de velocidad 10 4. Análisis analítico de velocidad. Método de las ecuaciones de laso cerrado 𝑟𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 = − 𝑖=1,𝑖≠𝑗 𝑛 ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 Sea: 𝒃 = 𝑏𝑥, 𝑏𝑦 𝑇 = − 𝑖=1,𝑖≠𝑗 𝑛 ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 𝑟𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 = 𝑏𝑥, 𝑏𝑦 𝑇 Sí se multiplica la expresión anterior por un vector unitario perpendicular al vector de velocidad lineal, −sin 𝜃𝑗(𝑡) , cos 𝜃𝑗(𝑡) 𝑇 , se tendrá que: 𝑟𝑗 𝑡 𝜃𝑗 𝑡 = −𝑏𝑥 sin 𝜃𝑗 𝑡 + 𝑏𝑦 cos𝜃𝑗(𝑡 𝜃𝑗 𝑡 = − 𝑏𝑥 sin 𝜃𝑗 𝑡 + 𝑏𝑦 cos𝜃𝑗(𝑡 𝑟𝑗 𝑡 Donde 𝑟𝑗 𝑡 , 𝜃𝑗 fueron encontrados durante el análisis de posición. De forma similar, si se multiplicará por un vector unitario perpendicular al vector de velocidad angular, cos 𝜃𝑗(𝑡) , sin 𝜃𝑗(𝑡) 𝑇 , se tendrá que: 𝑟𝑗(𝑡 = 𝑏𝑥 cos 𝜃𝑗 𝑡 + 𝑏𝑦 sin𝜃𝑗(𝑡 b) Segundo caso: se desconoce la magnitud del vector de velocidad lineal 𝑟𝑗(𝑡) correspondiente al vector posición 𝑟𝑗(𝑡) y la velocidad angular 𝜔𝑘 𝑡 correspondiente al vector posición 𝑟𝑘(𝑡).
- 11. IV. Análisis de velocidad 11 4. Análisis analítico de velocidad. Método de las ecuaciones de laso cerrado 𝑟𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 cos ) 𝜃𝑘(𝑡 , sin ) 𝜃𝑘(𝑡 𝑇 + 𝑟𝑘 𝑡 − sin 𝜃𝑘 𝑡 , cos 𝜃𝑘 𝑡 𝑇 𝜃𝑘 𝑡 = − 𝑖=1,𝑖≠𝑗,𝑖≠𝑘,𝑗≠𝑘 𝑛 ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 Sea: 𝒃 = 𝑏𝑥, 𝑏𝑦 𝑇 = − 𝑖=1,𝑖≠𝑗,𝑖≠𝑘,𝑗≠𝑘 𝑛 ) 𝑟𝑖(𝑡 cos ) 𝜃𝑖(𝑡 , sin ) 𝜃𝑖(𝑡 𝑇 𝑟 𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 cos ) 𝜃𝑘(𝑡 , sin ) 𝜃𝑘(𝑡 𝑇 + 𝑟𝑘 𝑡 − sin 𝜃𝑘 𝑡 , cos 𝜃𝑘 𝑡 𝑇 𝜃𝑘 𝑡 = 𝑏𝑥, 𝑏𝑦 𝑇 Sí la expresión anterior se multiplica por un vector unitario perpendicular al vector de velocidad lineal 𝑟𝑗(𝑡) cos 𝜃𝑗(𝑡) , sin 𝜃𝑗(𝑡) 𝑇 , −sin 𝜃𝑗(𝑡) , cos 𝜃𝑗(𝑡) 𝑇 , se tendrá: 𝑟𝑗 𝑡 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 −sin𝜃𝑗(𝑡 cos ) 𝜃𝑘(𝑡 + cos𝜃𝑗(𝑡 sin ) 𝜃𝑘(𝑡 + 𝑟𝑘 𝑡 sin𝜃𝑗(𝑡 sin 𝜃𝑘 𝑡 𝑟𝑗 𝑡 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 sin 𝜃𝑘 − 𝜃𝑗 + 𝑟𝑘 𝑡 cos 𝜃𝑘 − 𝜃𝑗 𝜃𝑘 𝑡 = −𝑏𝑥 sin 𝜃𝑗 𝑡 + 𝑏𝑦 cos𝜃𝑗(𝑡
- 12. IV. Análisis de velocidad 12 4. Análisis analítico de velocidad. Método de las ecuaciones de laso cerrado 𝜃𝑘 𝑡 = − 𝑏𝑥 sin 𝜃𝑗 𝑡 + 𝑏𝑦 cos𝜃𝑗(𝑡 + 𝑟𝑗 𝑡 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 sin 𝜃𝑘 − 𝜃𝑗 𝑟𝑘 𝑡 cos 𝜃𝑘 − 𝜃𝑗 Similarmente si se multiplica ahora por un vector unitario perpendicular al vector de velocidad angular 𝑟𝑘 𝑡 − sin 𝜃𝑘 𝑡 , cos 𝜃𝑘 𝑡 𝑇 𝜃𝑘 𝑡 , cos 𝜃𝑘(𝑡) , sin 𝜃𝑘(𝑡) 𝑇 , se tendrá: 𝑟𝑗(𝑡 cos𝜃𝑗(𝑡 cos ) 𝜃𝑘(𝑡 + sin𝜃𝑗(𝑡 sin ) 𝜃𝑘(𝑡 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 cos 𝜃𝑘 𝑡 𝑟𝑗(𝑡 cos 𝜃𝑘 − 𝜃𝑗 + 𝑟𝑗 𝑡 sin 𝜃𝑘 − 𝜃𝑗 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 = 𝑏𝑥 cos ) 𝜃𝑘(𝑡 + 𝑏𝑦 sin ) 𝜃𝑘(𝑡 𝑟𝑗(𝑡 = 𝑏𝑥 cos ) 𝜃𝑘(𝑡 + 𝑏𝑦 sin ) 𝜃𝑘(𝑡 − 𝑟𝑗 𝑡 sin 𝜃𝑘 − 𝜃𝑗 𝜃𝑗 𝑡 − ) 𝑟𝑘(𝑡 cos 𝜃𝑘 − 𝜃𝑗 c) Tercer caso: Se desconoce la magnitud de dos vectores de velocidad lineal, 𝑟𝑗(𝑡) , 𝑟𝑘(𝑡) . Aquí se seguirá un procedimiento similar al del segundo caso. 𝑟 𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 cos ) 𝜃𝑘(𝑡 , sin ) 𝜃𝑘(𝑡 𝑇 + 𝑟𝑘 𝑡 − sin 𝜃𝑘 𝑡 , cos 𝜃𝑘 𝑡 𝑇 𝜃𝑘 𝑡 = 𝑏𝑥, 𝑏𝑦 𝑇 Sí la expresión anterior se multiplica por un vector unitario perpendicular al vector de velocidad lineal 𝑟𝑗(𝑡) cos 𝜃𝑗(𝑡) , sin 𝜃𝑗(𝑡) 𝑇 , −sin 𝜃𝑗(𝑡) , cos 𝜃𝑗(𝑡) 𝑇 , se tendrá:
- 13. IV. Análisis de velocidad 13 4. Análisis analítico de velocidad. Método de las ecuaciones de laso cerrado ) 𝑟𝑘(𝑡 = −𝑏𝑥 sin 𝜃𝑗 𝑡 + 𝑏𝑦 cos 𝜃𝑗 𝑡 − 𝑟𝑗 𝑡 𝜃𝑗 𝑡 − 𝑟𝑘 𝑡 cos 𝜃𝑘 − 𝜃𝑗 𝜃𝑘 𝑡 sin 𝜃𝑘 − 𝜃𝑗 Sí en tanto se multiplica por un vector unitario perpendicular al vector 𝑟𝑘(𝑡) cos 𝜃𝑘(𝑡) , sin 𝜃𝑘(𝑡) 𝑇 , − sin 𝜃𝑘(𝑡) , cos 𝜃𝑘(𝑡) 𝑇 , se tendrá: 𝑟𝑗(𝑡 = −𝑏𝑥 sin 𝜃𝑘 𝑡 + 𝑏𝑦 cos 𝜃𝑘 𝑡 − 𝑟𝑘 𝑡 𝜃𝑘 𝑡 − 𝑟𝑗 𝑡 cos 𝜃𝑗 − 𝜃𝑘 𝜃𝑗 𝑡 sin 𝜃𝑗 − 𝜃𝑘 d) Cuarto caso: se desconocen las velocidades angulares de dos vectores, 𝜃𝑗 𝑡 , 𝜃𝑘 𝑡 . Como ya se pudo ver, la ecuación de laso cerrado tras ser derivada será igual a: 𝑟 𝑗(𝑡 cos𝜃𝑗(𝑡 , sin𝜃𝑗(𝑡 𝑇 + 𝑟𝑗 𝑡 − sin 𝜃𝑗 𝑡 , cos 𝜃𝑗 𝑡 𝑇 𝜃𝑗 𝑡 + ) 𝑟𝑘(𝑡 cos ) 𝜃𝑘(𝑡 , sin ) 𝜃𝑘(𝑡 𝑇 + 𝑟𝑘 𝑡 − sin 𝜃𝑘 𝑡 , cos 𝜃𝑘 𝑡 𝑇 𝜃𝑘 𝑡 = 𝑏𝑥, 𝑏𝑦 𝑇 Si esta expresión se multiplica por el vector unitario cos 𝜃𝑘 𝑡 , sin 𝜃𝑘 𝑡 𝑇 se tendrá:
- 14. IV. Análisis de velocidad 14 4. Análisis analítico de velocidad. Método de las ecuaciones de laso cerrado 𝜃𝑗 𝑡 = 𝑏𝑥 cos ) 𝜃𝑘(𝑡 + 𝑏𝑦 sin ) 𝜃𝑘(𝑡 − 𝑟𝑘 𝑡 − 𝑟𝑗(𝑡 cos 𝜃𝑘 − 𝜃𝑗 𝑟𝑗 𝑡 sin 𝜃𝑘 − 𝜃𝑗 Si en tanto se multiplica por el vector unitario cos𝜃𝑗 𝑡 , sin 𝜃𝑗 𝑡 𝑇 se tendrá: 𝜃𝑘 𝑡 = 𝑏𝑥 cos𝜃𝑗(𝑡 + 𝑏𝑦 sin𝜃𝑗(𝑡 − 𝑟𝑗 𝑡 − ) 𝑟𝑘(𝑡 cos 𝜃𝑗 − 𝜃𝑘 𝑟𝑘 𝑡 sin 𝜃𝑗 − 𝜃𝑘 e) Quinto caso: este caso es similar al segundo caso. Para más detalles vea el material de apoyo adjunto a la presentación. 5. Curvas de velocidad. Similar al análisis de posición, en muchas situaciones no solo interesa conocer la velocidad instantánea en una determinada fase sino que también se desea conocer las distintas velocidades que experimentan los eslabones a lo largo del ciclo de movimiento. Esto último constituye el fin de los diagramas de velocidad. En primer lugar ha de comentarse que un diagrama de posición o desplazamiento de un eslabón en función de la posición de otro puede llevarse a un diagrama de la posición o desplazamiento de dicho eslabón pero ahora en función del tiempo. 𝜔 = 𝑑𝜃 𝑑𝑡 ≅ ∆𝜃 ∆𝑡 , 𝒓 = 𝑑𝒓 𝑑𝑡 ≅ ∆𝒓 ∆𝑡
- 15. IV. Análisis de velocidad 15 5. Curvas de velocidad. También se debe recordar que la gráfica de velocidad puede construirse de forma aproximada a partir del gráfico de posición, al considerar la pendiente en los diferentes puntos.