
Descargar como PDF, PPTX




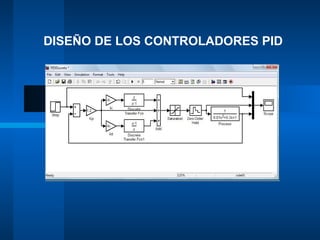




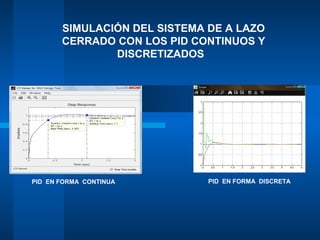


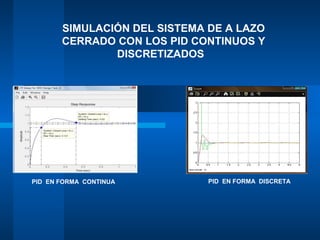







Este documento describe el diseño e implementación de un controlador PID para una planta de segundo orden utilizando el sistema MPLAB Starter Kit for DSPIC de Microchip. Explica las herramientas utilizadas como Matlab y MPLAB, determina la función de transferencia de la planta, diseña controladores PID para diferentes frecuencias objetivo, simula el sistema de lazo cerrado, y concluye que el diseño de controladores mediante Simulink evita cálculos manuales y que diferentes controladores cumplen los objetivos de diseño.

































































































