Descargado 71 veces

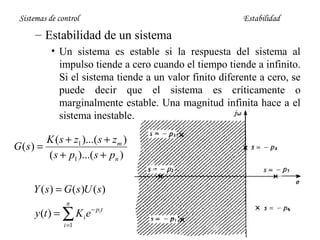



















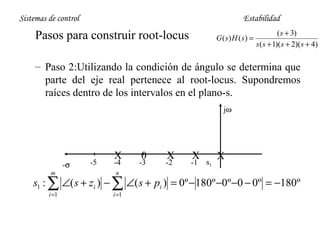




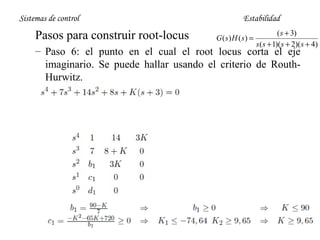












El documento describe los conceptos de estabilidad y lugar geométrico de las raíces (root-locus) en sistemas de control. Explica que un sistema es estable si su respuesta tiende a cero cuando el tiempo tiende a infinito, y que la estabilidad depende de la ubicación de los polos de la función de transferencia. También presenta el criterio de Routh-Hurwitz para determinar la estabilidad analizando los signos de los coeficientes, y los pasos para construir el root-locus comenzando en los polos y terminando en los ceros o































































