Descargar como PDF, PPTX

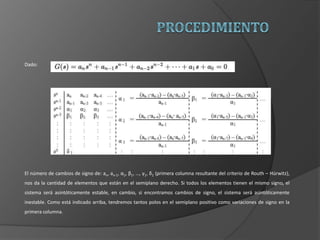
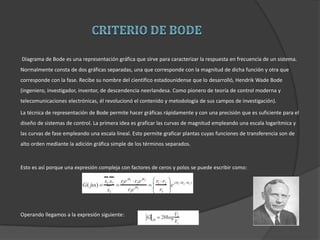
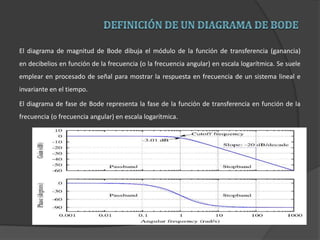

El documento detalla métodos para analizar la estabilidad de sistemas dinámicos, centrándose en el teorema de Routh-Hurwitz y el criterio de Nyquist. Se discuten técnicas de sintonización de controladores, como los métodos de Ziegler-Nichols y Dahlin, destinados a optimizar la respuesta de sistemas de control. Además, se abordan representaciones gráficas como el diagrama de Bode, que permite visualizar la respuesta en frecuencia de estos sistemas.


















































































