Descargado 130 veces



![Definición de la Transformada Z Se define la Transformada Z, X(z) de una secuencia x[n] La cantidad compleja z generaliza el concepto de frecuencia al dominio complejo como Para una secuencia x[n]={6 4 3 2 -3} , la Transformada Z es X(z)=6z2+4z1+3z0+2z-1-3z-2. El valor z-1 es el operador de retraso unidad.](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-5-320.jpg)


![ROC Para una secuencia x[n] de longitud finita, X(z) converge para todo z , excepto para z=0 y/o z=∞ (dependiendo de si X(z) tiene términos z -k y/o z k ). Transformadas Z de algunas secuencias: Impulso Unidad x[n] = [n] X(z) = 1 , ROC -∞<z<∞ Pulso Rectangular x[n] = u[n]-u[N-n] Escalón Unitario x[n] = u[n] ](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-8-320.jpg)



![Propiedades Superposición ax[n]+by[n] aX[z] + bY[z] Desplazamiento x[n-1] z -1 X[z]+x(-1) x[n-N] z -N X[z]+z -(N-1) x(-1)+…. x(-N) x[n+N] z N X[z]-z N x(-1)-…. zx(N-1)](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-12-320.jpg)
![Propiedades Escalado a n x[n] X[z/a] Multiplicado por n nx[n] -zdX[z]/dz n 2](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-13-320.jpg)








![Propiedades de la ROC Si x [ n ] tiene duración finita, la ROC constituye todo el plano z , excepto posiblemente en z = 0 y/o z = ∞. Si x [ n ] es una secuencia del lado derecho, y si | z | = r o se encuentra en la ROC, todos los valores finitos de z para los cuales | z | > r o se encuentran (converge más rápido que) también en la ROC.](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-22-320.jpg)
![Propiedades de la ROC Si x [ n ] es una secuencia del lado izquierdo, y si | z | = r o se encuentra en la ROC, todos los valores finitos de z para los que 0 < | z | < r o se encuentran también en la ROC. Si x [ n ] es bilateral, y si | z | = r o se encuentra en la ROC, la ROC consiste en un anillo en el plano z que incluye el círculo | z | = r o . A que tipo de señales corresponden las siguientes ROC?](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-23-320.jpg)









![El plano z y Estabilidad del Sistema La estabilidad de un sistema LTI discreto requiere que la respuesta al impulso h[n] sea absolutamente sumable (integrable en continuo). Esto quiere decir que h[n]=0 en n=∞ . Para ello es necesario que los polos de la función de transferencia H(z) estén todos dentro del círculo unidad en el plano z ( |p i |<1 ). Esto evita que la respuesta tenga exponenciales crecientes. La estabilidad de una función de Transferencia puede determinarse simplemente inspeccionando los coeficientes del denominador de la función de Transferencia. Para ello, debe estar en forma de términos de 2º Orden,](https://image.slidesharecdn.com/transformadazeta-1229979882930551-2/85/TRANSFORMADA-ZETA-33-320.jpg)






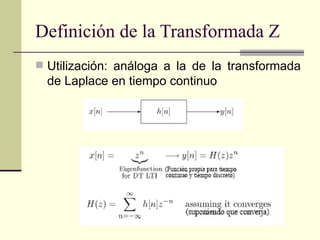
La transformada zeta es una herramienta para el análisis de sistemas discretos. Se define como la transformada de Zappa de una secuencia discreta y generaliza el concepto de frecuencia al dominio complejo. La transformada de Z proporciona propiedades como superposición, desplazamiento y escalado que permiten modelar ecuaciones diferenciales discretas y funciones de transferencia.











































































































