Descargar para leer sin conexión











![El sensor táctil es un interruptor: puede presionarse o liberarse.
Ver: Observe la respuesta actual del sensor táctil en la pantalla utilizando Ver [View]. Un cero [0]
significa que no está presionado el botón del sensor táctil. Un uno [1] en la pantalla significa que
está presionado el botón del sensor táctil.
Presione y retenga el botón del sensor
táctil mientras observa la pantalla del NXT.
Deberá observar un uno (1) en la pantalla
Ahora libere el botón del sensor táctil.
Deberá observar un cero (0) en la pantalla.](https://image.slidesharecdn.com/legomindstormshardware-131017195145-phpapp01/85/Lego-mindstorms-hardware-14-320.jpg)
![El sensor acústico detecta el nivel de decibeles: la suavidad o intensidad de un sonido. El
sensor acústico detecta dB y dBA. dBA: sonidos que el oído humano es capaz de oír.
dB: todos los sonidos existentes, incluyendo los sonidos demasiado altos o bajos para el
oído humano.
Seleccione Ver [View]
en la pantalla
del NXT.
Seleccione el icono
Sonido dB.
Seleccione el puerto 2.
Haga sonidos en el micrófono (sensor acústico) y observe
las lecturas
en el NXT. Pruebe también obtener la lectura de los
sonidos a su
alrededor: ¿Qué tan fuertes son las voces más cercanas?](https://image.slidesharecdn.com/legomindstormshardware-131017195145-phpapp01/85/Lego-mindstorms-hardware-15-320.jpg)


![Los tres servomotores interactivos le proporcionan al robot la capacidad de moverse. El
bloque Desplazar [Move] automáticamente alinea sus velocidades para que el robot se
mueva suavemente.
Seleccione el icono de
rotaciones del motor.
Seleccione el puerto en el cual ha colocado el motor.
Ahora intente fijar una rueda al motor y mida las rotaciones presionando
la rueda sobre el suelo.](https://image.slidesharecdn.com/legomindstormshardware-131017195145-phpapp01/85/Lego-mindstorms-hardware-18-320.jpg)



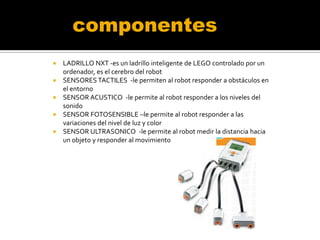
El documento describe las capacidades y componentes del robot LEGO MINDSTORMS, incluyendo su ladrillo inteligente NXT que contiene sensores como táctiles, acústicos y fotosensibles, así como motores e iluminación. Explica cómo construir, programar y probar el robot utilizando el software MINDSTORMS y conectando los componentes a través de puertos y Bluetooth.









































