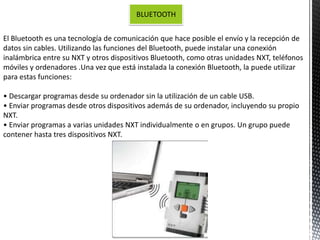
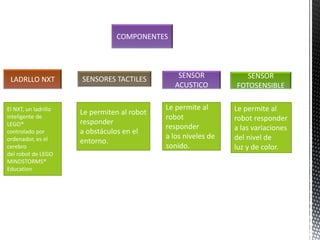
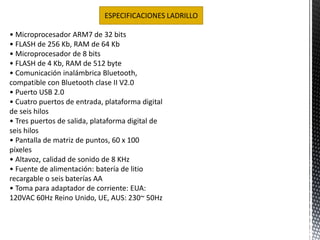
Este documento describe el uso del sistema LEGO MINDSTORMS Education para que los equipos de estudiantes diseñen, construyan, programen y prueben robots. Los estudiantes desarrollan habilidades de resolución de problemas y creatividad mientras aprenden conceptos de matemáticas y ciencia. El documento también explica los componentes del sistema, incluido el ladrillo inteligente NXT, sensores, motores y cómo conectarlos.




![SERVOMOTOR
INTERACTIVO
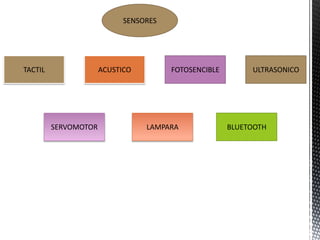
Los tres servomotores interactivos le proporcionan al robot la capacidad de moverse. El
bloque Desplazar [Move] automáticamente alinea sus velocidades para que el robot se
mueva suavemente. Todos los servomotores interactivos disponen de un sensor de rotación
integrado.
LAMPARA
Se puede encender y apagar las lámparas, para crear patrones intermitentes de luz. También
pueden utilizarse para activar el sensor fotosensible, para mostrar que un motor está
encendido o para indicar el estado de un sensor.](https://image.slidesharecdn.com/legomindstormnxt1-141104082423-conversion-gate01/85/Lego-mindstorm-nxt-1-14-320.jpg)