Descargar para leer sin conexión





![Sensor táctil
O Sugerencias de uso
O Puede agregar el sensor táctil a
un modelo NXT y luego
O programar el comportamiento del
modelo Ver
O Observe la respuesta actual del
sensor táctil en la
O pantalla utilizando Ver [View]. Un
cero [0] significa que
O no está presionado el botón del
sensor táctil. Un uno [1]
O en la pantalla significa que está
presionado el botón
O del sensor táctil. Para que cambie
O cuando se presiona o se libera el
sensor táctil.
O En el Robot Educador se incluye
la posibilidad de programar
O ideas utilizando el sensor táctil.](https://image.slidesharecdn.com/manualnxt9797-130930113934-phpapp01/85/Manual-nxt-9797-7-320.jpg)
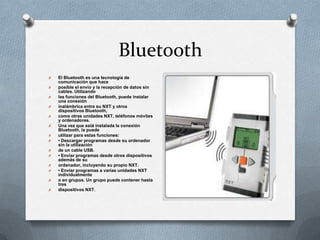
![Sensor acústico
O El sensor acústico detecta el nivel de decibeles:
la suavidad o
O intensidad de un sonido. El sensor acústico
detecta dB y dBA.
O dBA: sonidos que el oído humano es capaz de oír.
O dB: todos los sonidos existentes, incluyendo los
sonidos
O demasiado altos o bajos para el oído humano.
O El sensor acústico puede medir los niveles de
presión acústica
O hasta 90 dB, cerca del nivel de una máquina
cortacésped. Las
O lecturas del sensor acústico en el LEGO®
MINDSTORMS® NXT se
O muestran en el porcentaje [%] de sonido que el
sensor es capaz
O de leer. A modo de comparación, entre 4 y 5 % es
similar a una
O sala en silencio y entre 5 y 10 % es cerca del nivel
de alguien
O hablando a cierta distancia. De 10 a 30 % es una
conversación
O normal cerca del sensor o música que se
reproduce a un nivel .](https://image.slidesharecdn.com/manualnxt9797-130930113934-phpapp01/85/Manual-nxt-9797-8-320.jpg)






El documento presenta una introducción al sistema LEGO MINDSTORMS Education, que permite a los estudiantes aprender ciencia, tecnología y matemáticas de forma divertida mediante la construcción y programación de robots. Incluye una descripción de los diferentes sensores como táctil, acústico, fotosensible y ultrasónico, así como de los motores y lámparas que se pueden conectar. También explica cómo utilizar la tecnología Bluetooth para enviar y recibir datos entre dispositivos sin cables.










































































