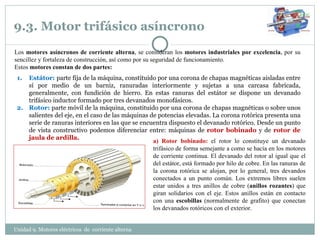
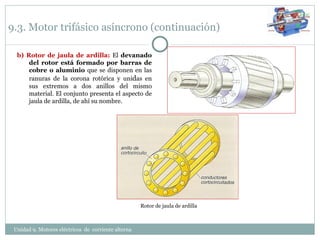
El documento proporciona información sobre motores eléctricos de corriente alterna. Explica que estos motores se usan comúnmente en la industria porque pueden funcionar directamente con la corriente alterna de la red eléctrica, a diferencia de los motores de corriente continua. Describe los principales tipos de motores de corriente alterna, incluyendo motores universales monofásicos, motores de inducción trifásicos asíncronos y sus características de funcionamiento.