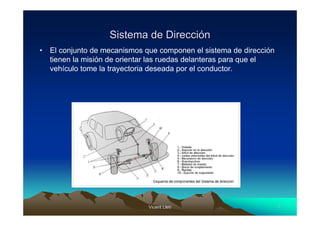
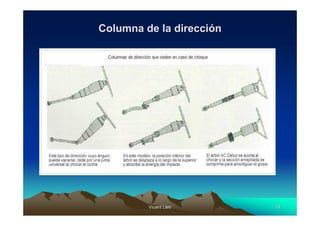
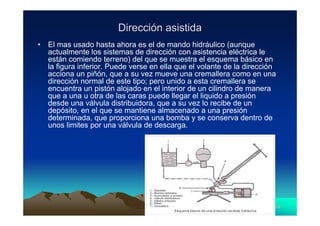
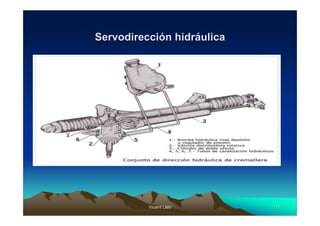
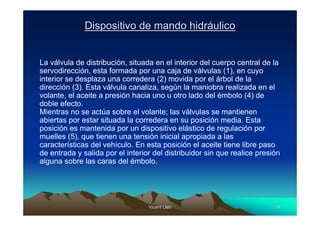
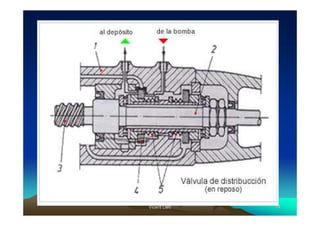
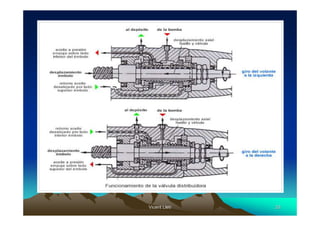
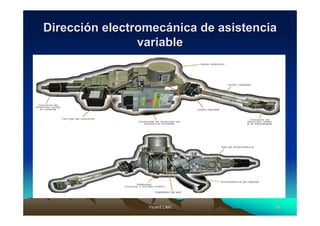
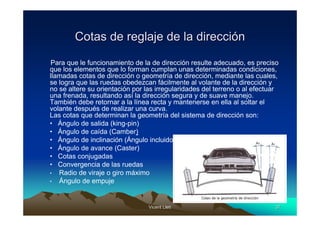
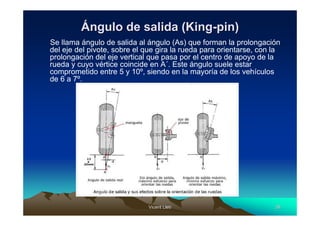
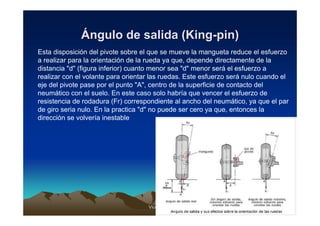
El documento describe los diferentes sistemas de dirección de un vehículo, incluyendo su función, características y mecanismos. Se explican sistemas de dirección para ejes delanteros rígidos y suspensiones independientes, así como mecanismos de tornillo sinfín, cremallera y columna de dirección. También se detalla la dirección asistida hidráulica, incluyendo su bomba de presión, distribuidor y ventajas e inconvenientes.