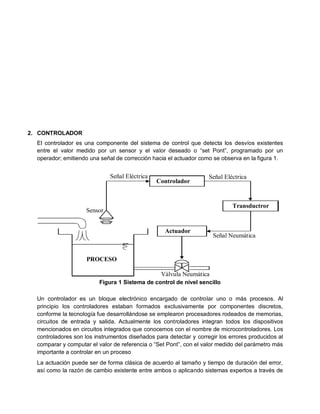
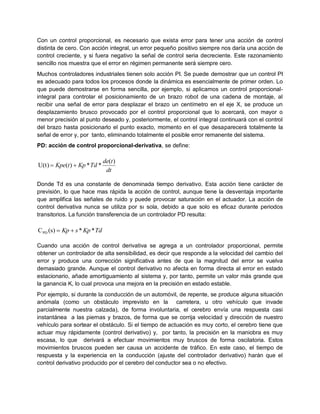
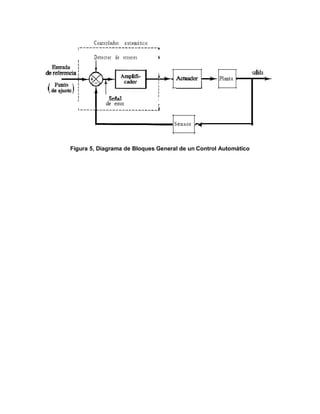
Este documento describe los conceptos básicos de los controladores y las diferentes acciones de control. Explica que un controlador detecta los desvíos entre el valor medido y el valor deseado, emitiendo una señal de corrección al actuador. Luego describe los tipos de controladores P, I, D, PI, PD y PID, y cómo cada uno usa la señal de error de manera diferente para lograr el control. Finalmente, explica cómo las acciones combinadas de un controlador PID aprovechan las ventajas de cada acción individual para lograr un control más preciso y est