Descargado 151 veces


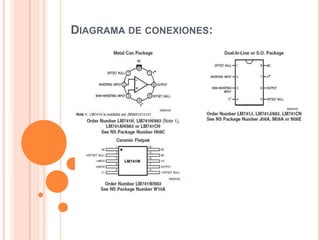

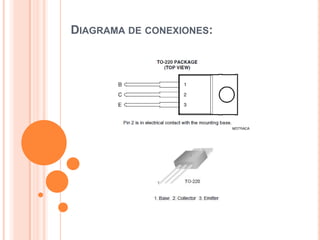


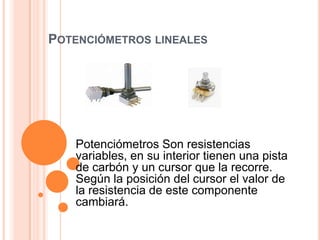
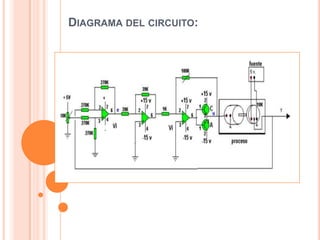
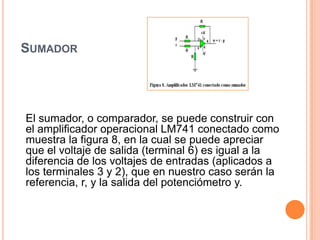
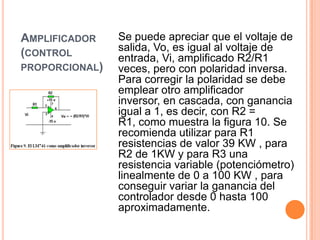
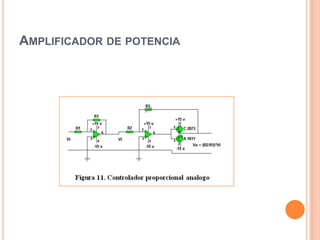

Este documento describe el diseño de un controlador PID para regular la posición de un servomotor de corriente directa utilizando amplificadores operacionales LM741, transistores TIP41 y TIP42, resistencias y potenciómetros. Explica los componentes del circuito, incluido un sumador, amplificadores proporcionales y de potencia, y proporciona diagramas del circuito PID propuesto.










































































