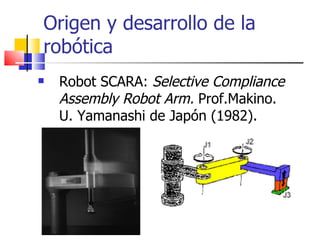
Este documento presenta una introducción a la robótica. Explica los antecedentes históricos de la robótica desde la antigua Grecia hasta el siglo XX cuando se acuñó el término "robot". También describe el origen y desarrollo de la robótica, incluyendo los primeros telemanipuladores y robots industriales. Define un robot industrial como una máquina de manipulación automática, reprogramable y multifuncional con tres o más ejes, y un robot móvil como uno que puede moverse. Ambos tipos de robots comparten característic