Descargar como PDF, PPTX
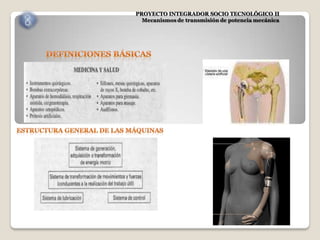
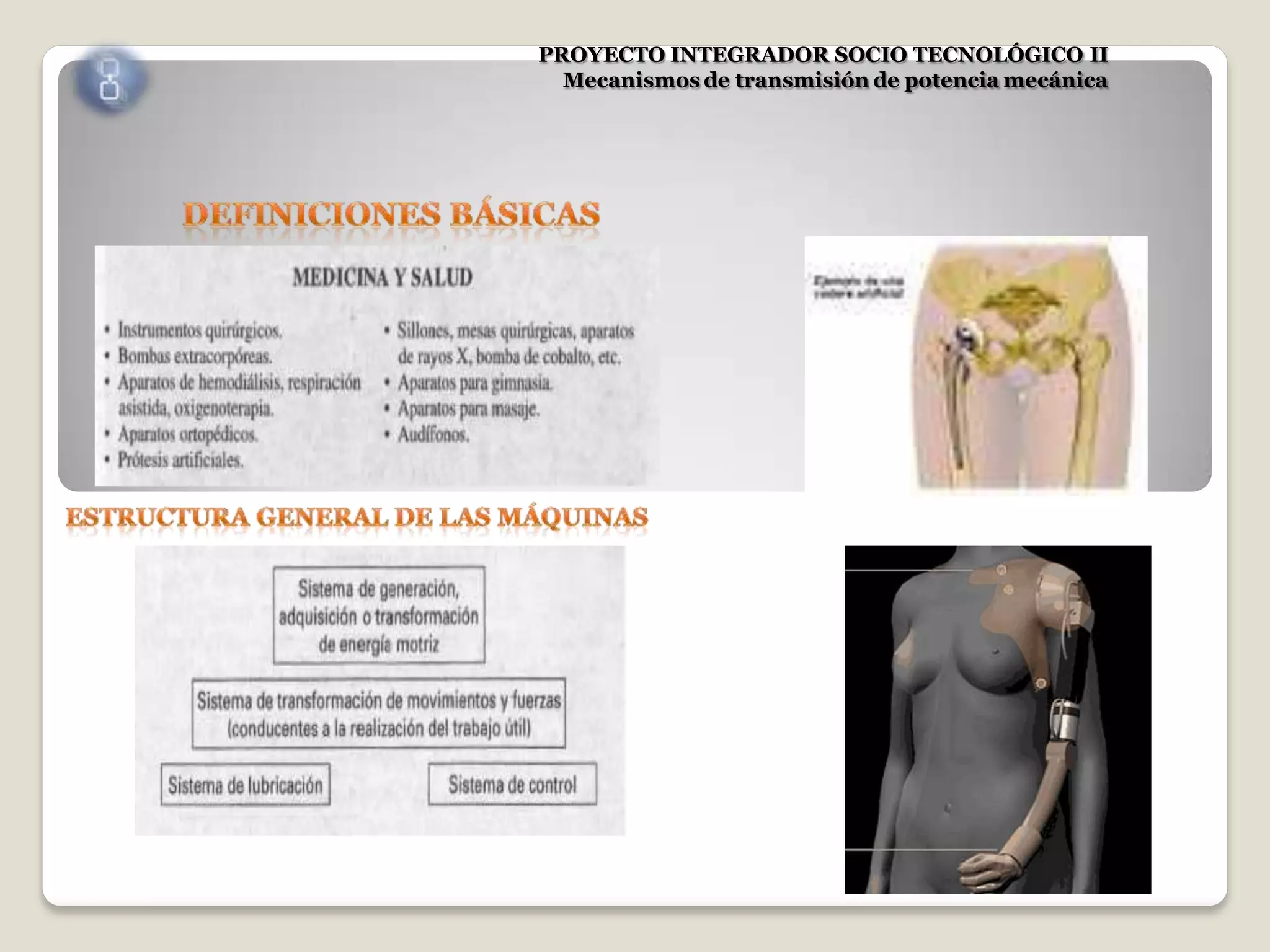
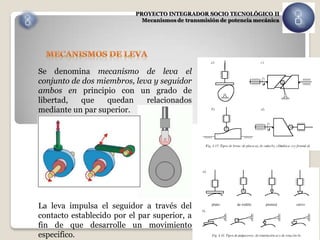

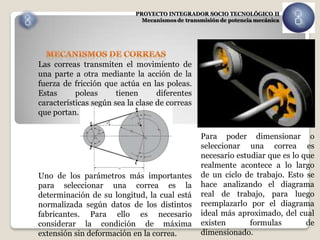
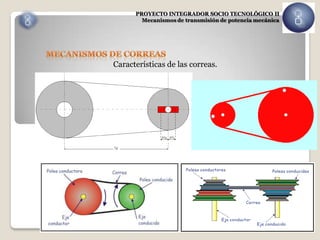
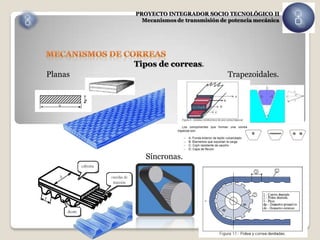
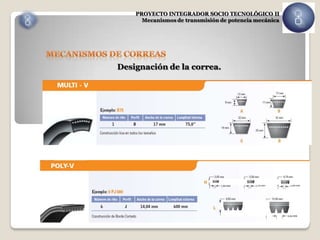
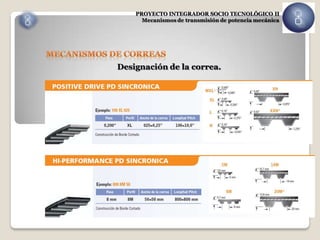
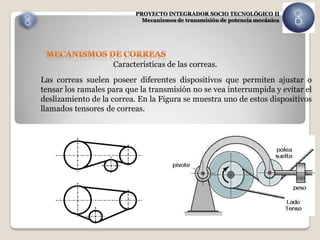
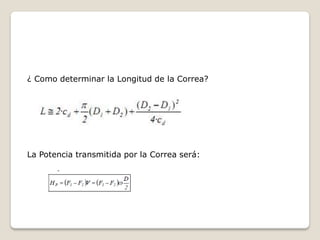
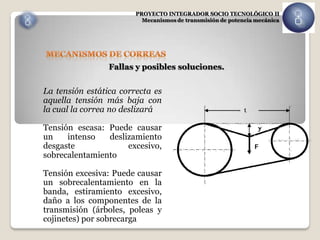
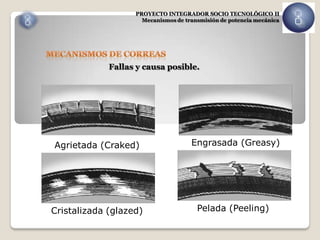
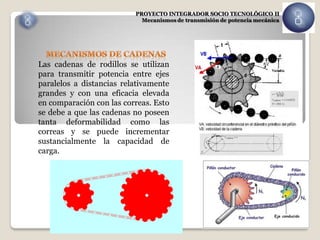
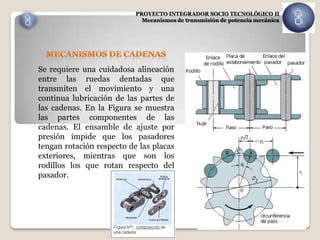
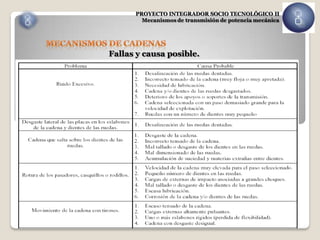
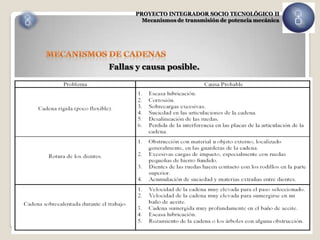
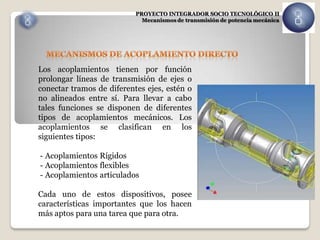
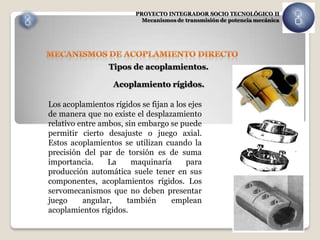





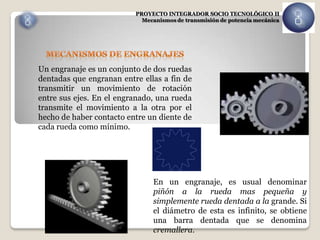


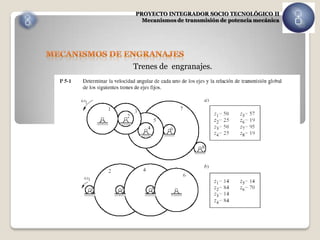
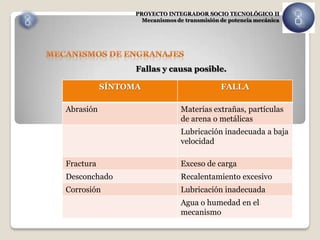

El documento describe diferentes mecanismos de transmisión de potencia mecánica como engranajes, correas, cadenas, levas, acoplamientos y sus características. Explica conceptos como máquina, mecanismo, elemento, carga, junta, restricción y diferentes tipos de pares cinemáticos. También analiza fallas comunes y cómo determinar la longitud de correas.
![1) sistemas hidráulicos[1]](https://cdn.slidesharecdn.com/ss_thumbnails/1sistemashidrulicos1-111122190747-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















































![Sistemas tecnologicos[4]](https://cdn.slidesharecdn.com/ss_thumbnails/sistemastecnologicos4-110531132714-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sistemas tecnologicos[4]](https://cdn.slidesharecdn.com/ss_thumbnails/sistemastecnologicos4-110531132314-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












































