Descargar para leer sin conexión
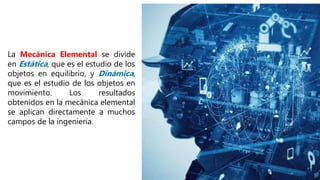




















Este documento presenta una introducción a la mecánica elemental. Se divide la mecánica elemental en estática, que es el estudio de objetos en equilibrio, y dinámica, que es el estudio de objetos en movimiento. También describe conceptos fundamentales como posición, velocidad, aceleración, fuerzas y leyes de Newton. Finalmente, presenta algunos problemas de mecánica elemental para resolver.















































































