Descargar como PDF, PPTX



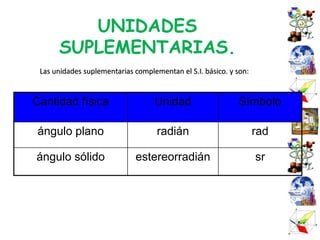














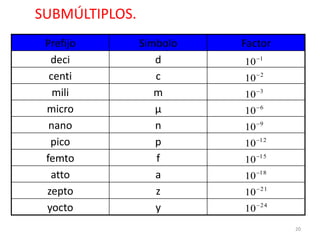




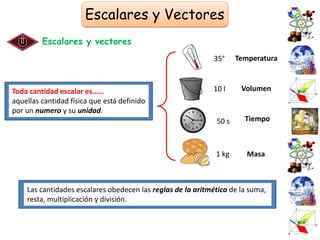





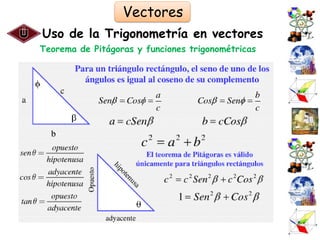
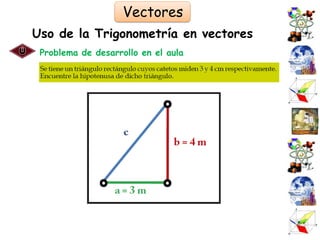




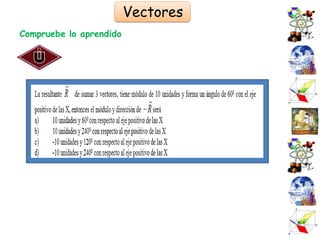

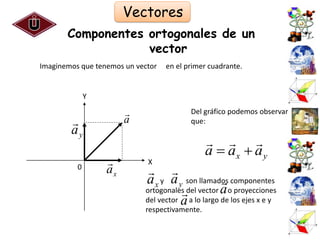







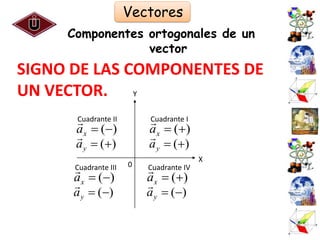



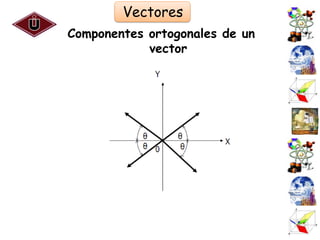
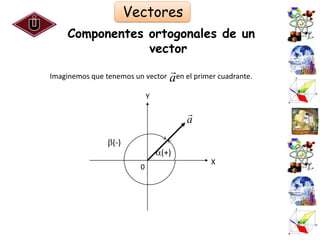
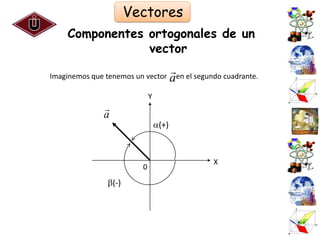
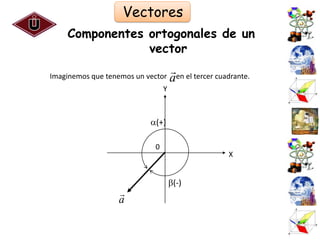
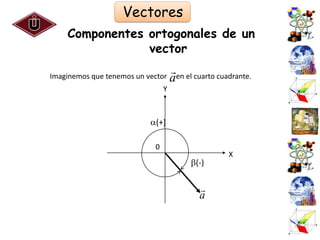




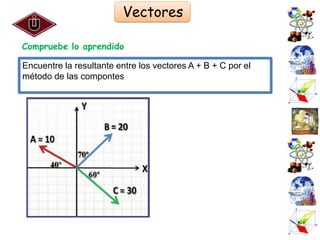

El documento presenta una introducción al Sistema Internacional de Unidades (SI) y conceptos fundamentales como unidades, sistemas de unidades, unidades fundamentales, unidades derivadas y múltiplos/submúltiplos. También explica la diferencia entre cantidades escalares y vectoriales, y cómo representar y calcular componentes de vectores usando trigonometría.































































































