Este documento presenta los conceptos fundamentales de la representación vectorial de señales digitales. Explica que una señal puede representarse como una combinación lineal de vectores ortonormales, y que esto permite mapear señales a vectores en un espacio vectorial. También describe el algoritmo de ortogonalización de Gram-Schmidt para generar conjuntos de vectores ortonormales a partir de vectores dados.
Universidad Nacional deIngeniería
Comunicaciones II
Conferencia 12: Representación espacial de señales digitales
UNIDAD IV: REPRESENTACIÓN VECTORIAL DE SEÑALES DIGITALES
Instructor: Israel M. Zamora, MS Telecommunications Management
Profesor Titular, Departamento de Sistemas Digitales y Telecomunicaciones.
Universidad Nacional de Ingeniería
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig
2.
Outline
• Revisiónal concepto vectorial
• Ortogonalidad
• Representación geométrica
• Representación geométrica para un espacio n-dimensional
• Propiedades Vectoriales
• Modelo de sistema digital vectorial
• Conversión formas de onda a vectores espaciales
• Representación Espacial de Señales
• Ilustración
• Algoritmo de ortogonalización Gram-Schmidt
– Procedimiento
– Ejemplo
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig
3.
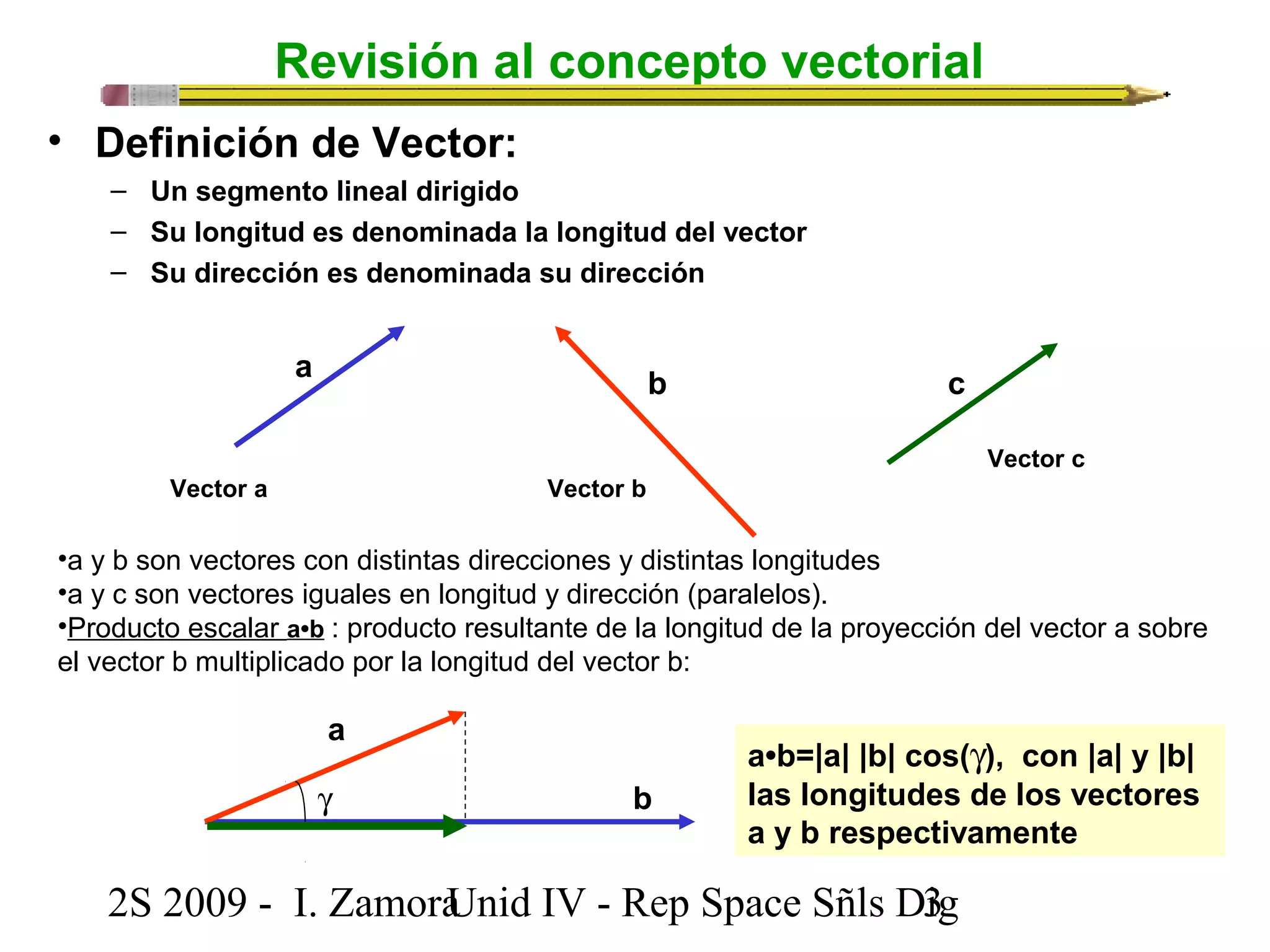
Revisión al conceptovectorial
• Definición de Vector:
– Un segmento lineal dirigido
– Su longitud es denominada la longitud del vector
– Su dirección es denominada su dirección
a b
Vector a Vector b
c
•a y b son vectores con distintas direcciones y distintas longitudes
•a y c son vectores iguales en longitud y dirección (paralelos).
•Producto escalar a•b : producto resultante de la longitud de la proyección del vector a sobre
el vector b multiplicado por la longitud del vector b:
a
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig
Vector c
g
b
a•b=|a| |b| cos(g), con |a| y |b|
las longitudes de los vectores
a y b respectivamente
4.
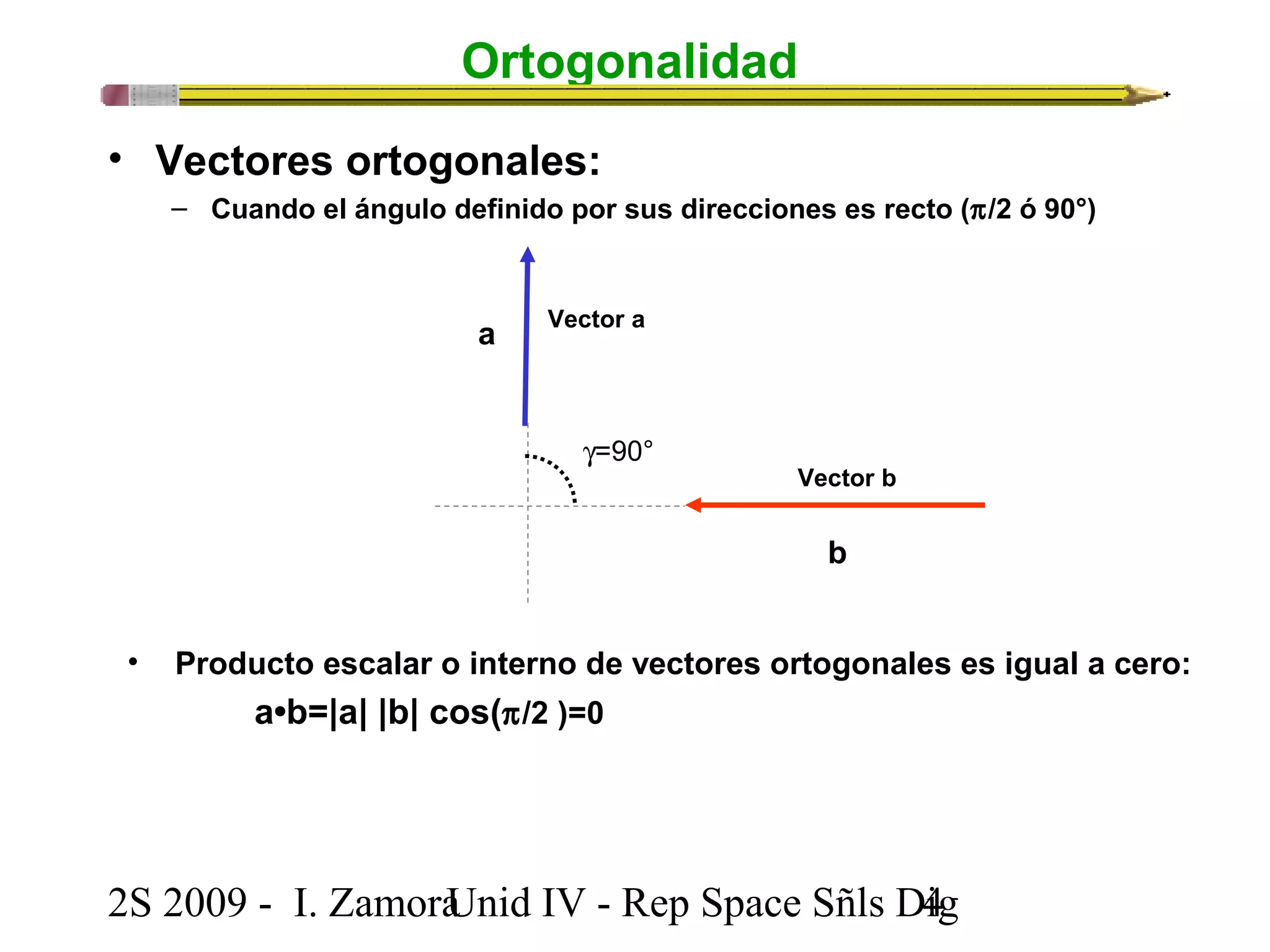
Ortogonalidad
• Vectoresortogonales:
– Cuando el ángulo definido por sus direcciones es recto (p/2 ó 90°)
a
Vector b
b
Vector a
g=90°
• Producto escalar o interno de vectores ortogonales es igual a cero:
a•b=|a| |b| cos(p/2 )=0
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D4ig
5.
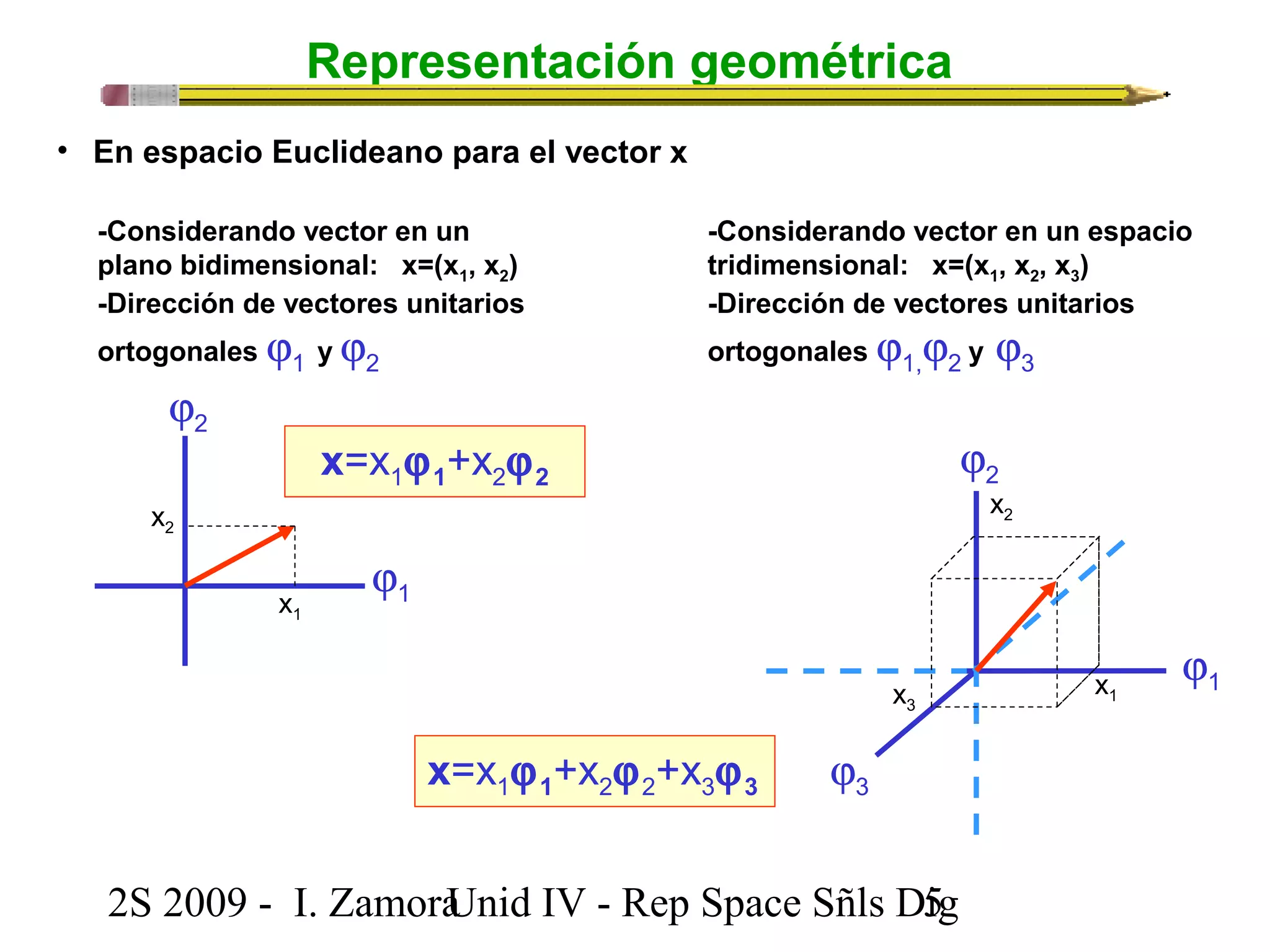
Representación geométrica
•En espacio Euclideano para el vector x
-Considerando vector en un
plano bidimensional: x=(x1, x2)
-Dirección de vectores unitarios
ortogonales j1 y j2
-Considerando vector en un espacio
tridimensional: x=(x1, x2, x3)
-Dirección de vectores unitarios
ortogonales j1,j2 y j3
j2
x=x1j1+x2j2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D5ig
j2
x2
x1
j1
x1
x2
x3
j1
jx=x 3 1j1+x2j2+x3j3
6.
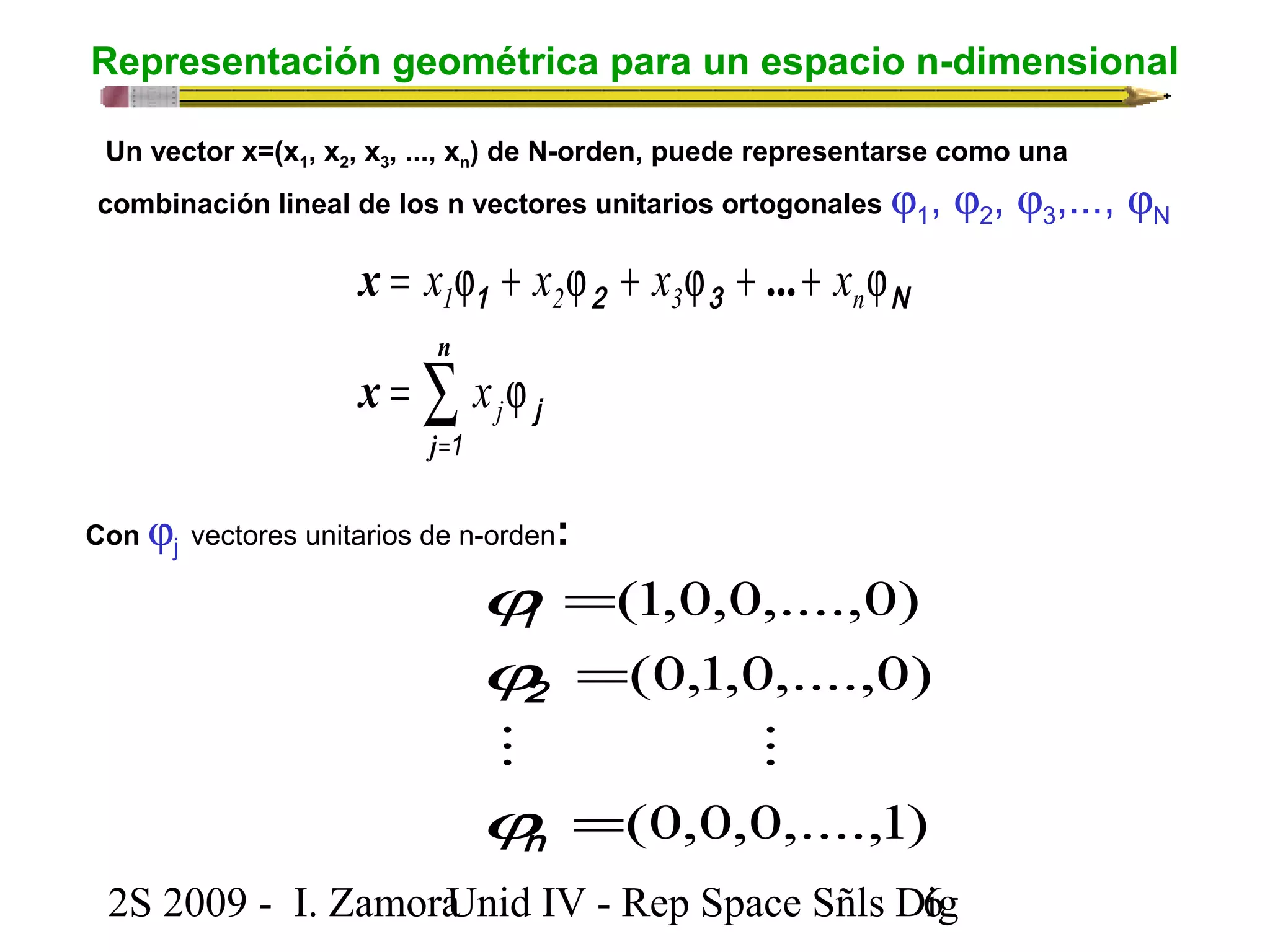
Representación geométrica paraun espacio n-dimensional
Un vector x=(x1, x2, x3, ..., xn) de N-orden, puede representarse como una
combinación lineal de los n vectores unitarios ortogonales j1, j2, j3,..., jN
x ...
x x x x
= j + j + j + + j
1 2 3 n
x
n
å=
1 2 3 N
= j
j
x
1
j
j
Con jj vectores unitarios de n-orden:
(1,0,0,....,0)
(0,1,0,....,0)
=
=
(0,0,0,....,1)
=
j
1
j
2
j
n
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D6ig
7.
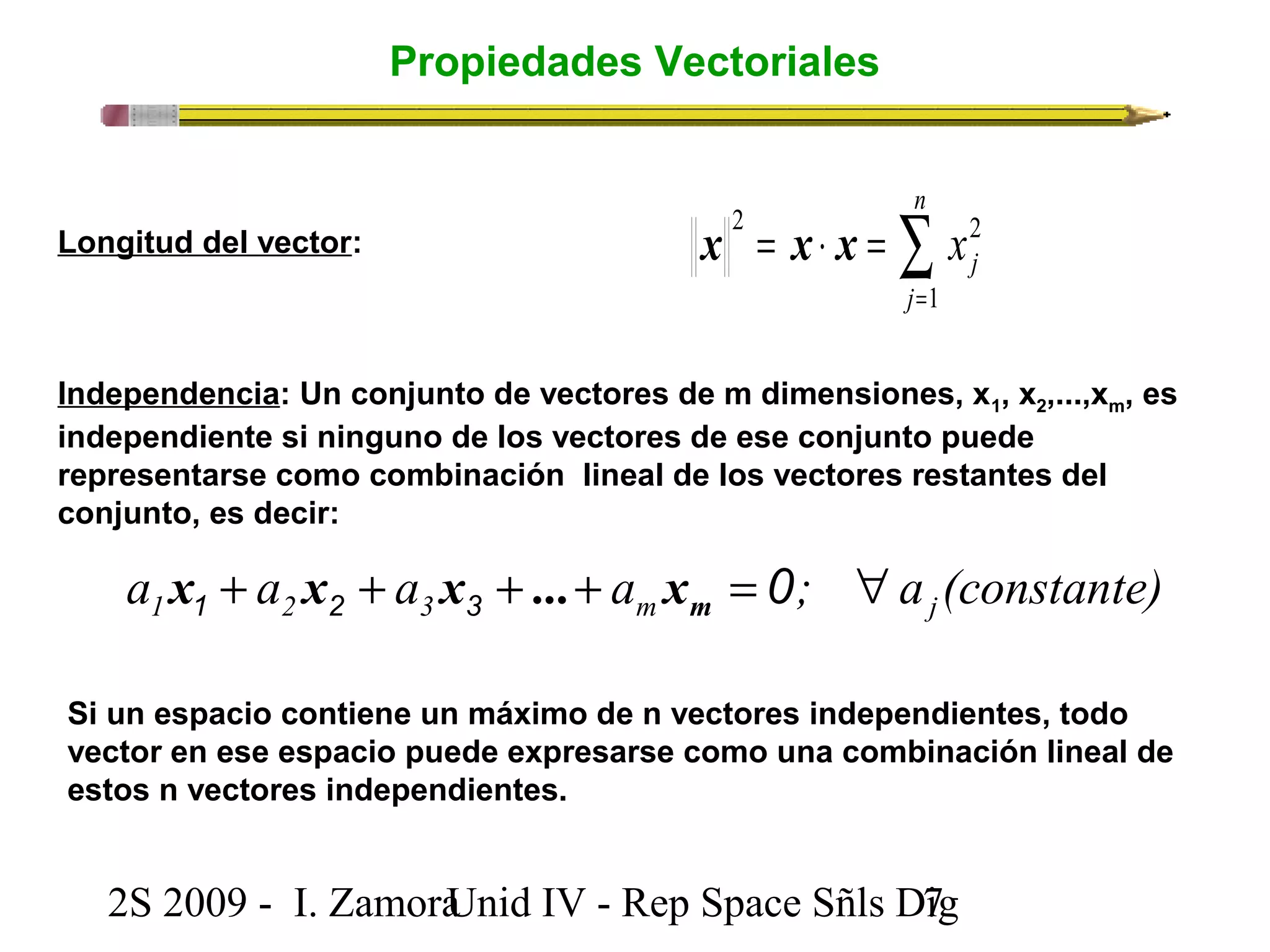
Propiedades Vectoriales
n
Longitud del vector: å=
x 2 = x × x
=
2 j
j x
1
Independencia: Un conjunto de vectores de m dimensiones, x1, x2,...,xm, es
independiente si ninguno de los vectores de ese conjunto puede
representarse como combinación lineal de los vectores restantes del
conjunto, es decir:
a a a a ; a (constante) 1 2 3 m j + + + + = 0 " 1 2 3 m x x x ... x
Si un espacio contiene un máximo de n vectores independientes, todo
vector en ese espacio puede expresarse como una combinación lineal de
estos n vectores independientes.
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D7ig
8.
Propiedades Vectoriales
Vectoresbase: Son los n vectores independientes en un espacio n-dimensional
Vectores ortonormales: Son vectores ortogonales con longitud unitarias, de
un espacio n-dimensional. Satisfacen la propiedad del producto punto o
interno:
0
î í ì
1
i ¹
j
i =
j
j ×j =
i j
Dado un vector x, sus cómponentes xj pueden determinarse de la forma
siguiente:
j j x = x × j
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D8ig
9.
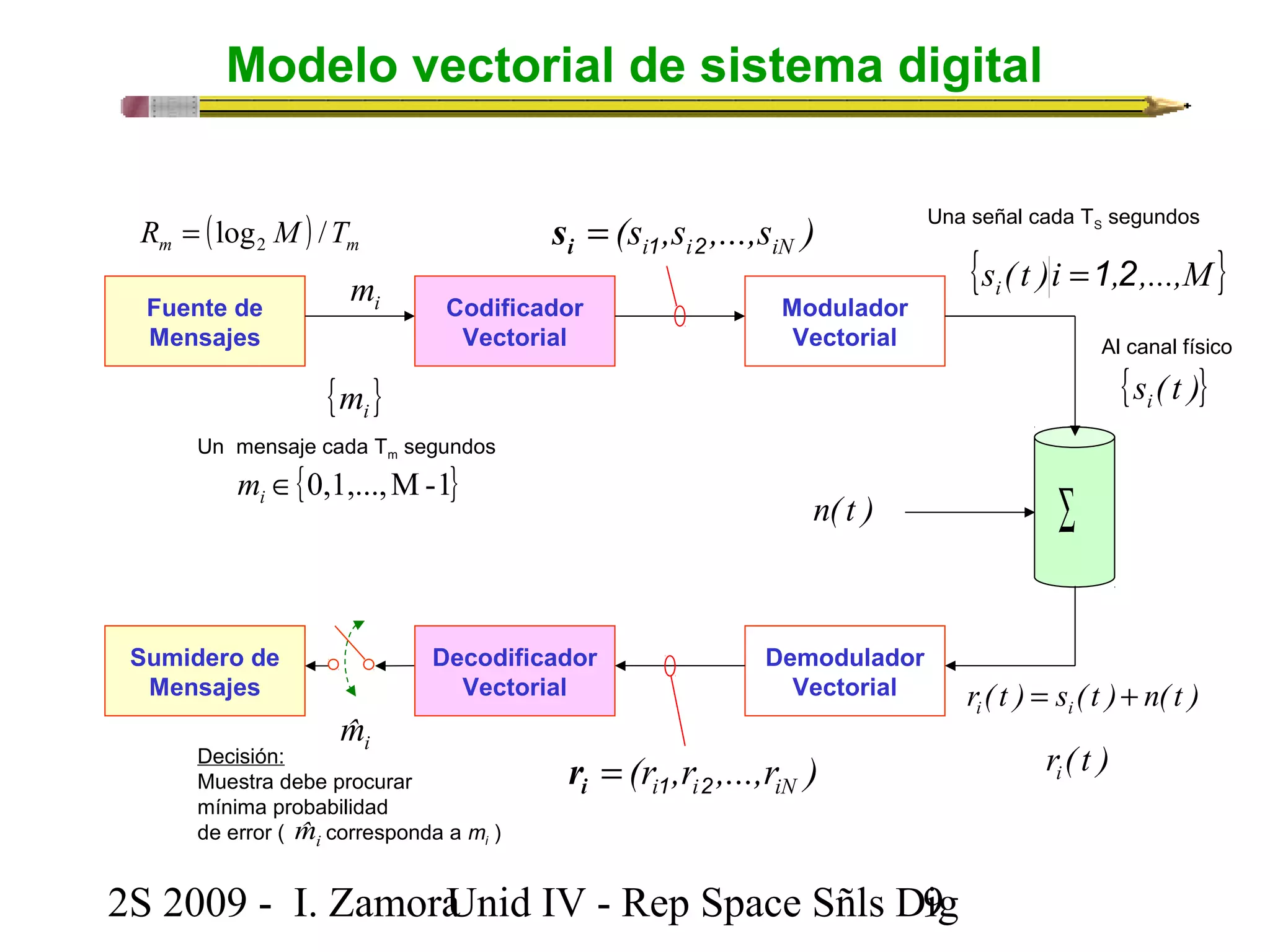
Modelo vectorial desistema digital
( ) m m R log M /T 2 =
i m
Fuente de
Mensajes
(s ,s ,...,s ) i1 i2 iN = i s
Codificador
Vectorial
Un mensaje cada Tm segundos
Î {0,1,...,M-1} i m
Modulador
Vectorial
Sumidero de
Mensajes
Decodificador
Vectorial
Demodulador
Vectorial
Una señal cada TS segundos
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D9ig
{s ( t )i , ,...,M} i =1 2
Al canal físico
{ } i m {s ( t )} i
n( t ) å
r ( t ) s ( t ) n( t ) i i = +
(r ,r ,...,r ) i1 i2 iN = i r
i mˆ
Decisión:
Muestra debe procurar
mínima probabilidad
de error ( corresponda a mi i ) mˆ
r ( t ) i
10.
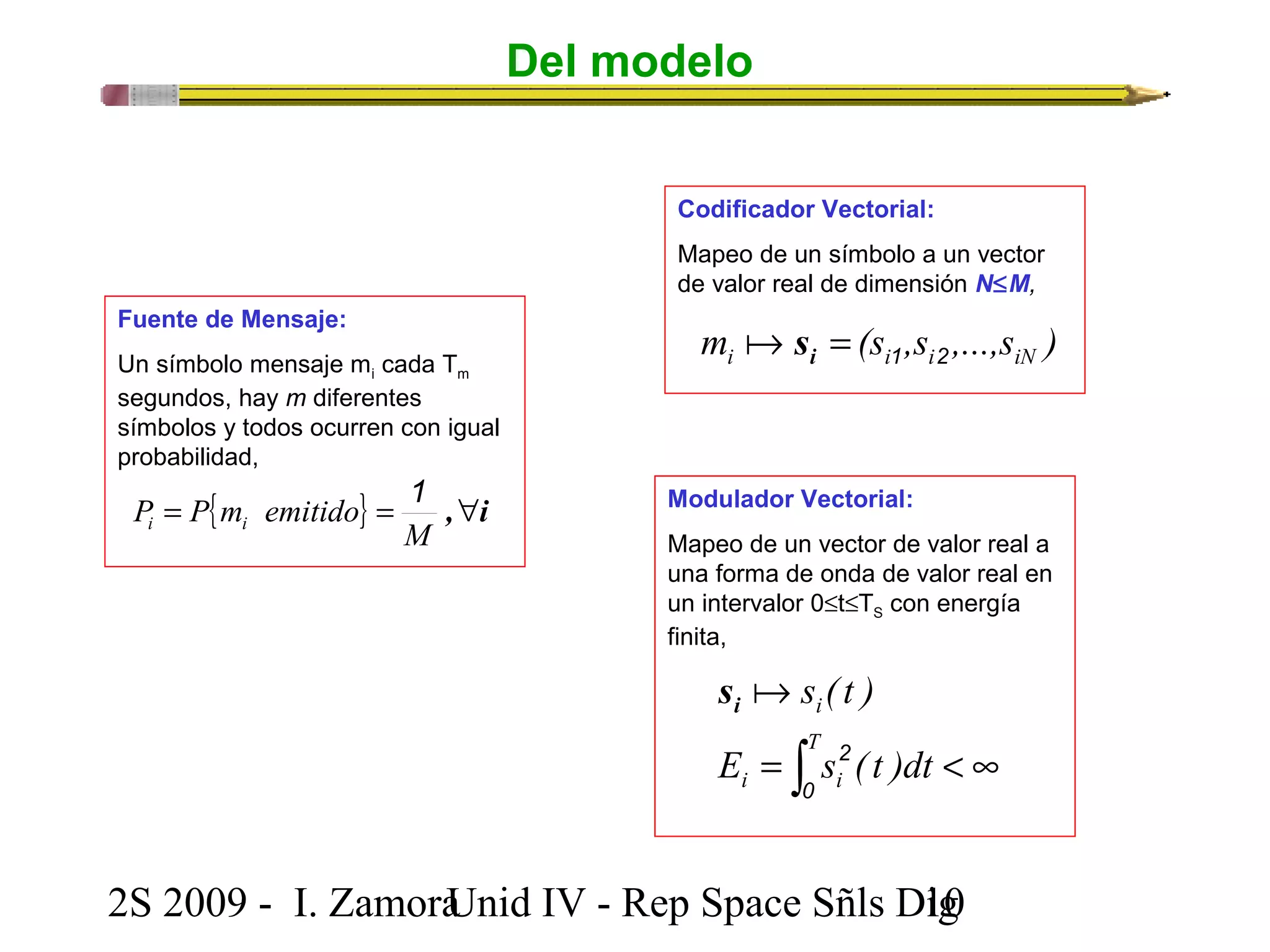
Del modelo
Fuentede Mensaje:
Un símbolo mensaje mi cada Tm
segundos, hay m diferentes
símbolos y todos ocurren con igual
probabilidad,
1
= { } = , "i
M
P P m emitido i i
Codificador Vectorial:
Mapeo de un símbolo a un vector
de valor real de dimensión N£M,
m (s ,s ,...,s ) i i1 i2 iN = i s
Modulador Vectorial:
Mapeo de un vector de valor real a
una forma de onda de valor real en
un intervalor 0£t£TS con energía
finita,
s ( t )
i
i s
= ò T
2
< ¥ E s ( t )dt
i i
0
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig0
11.
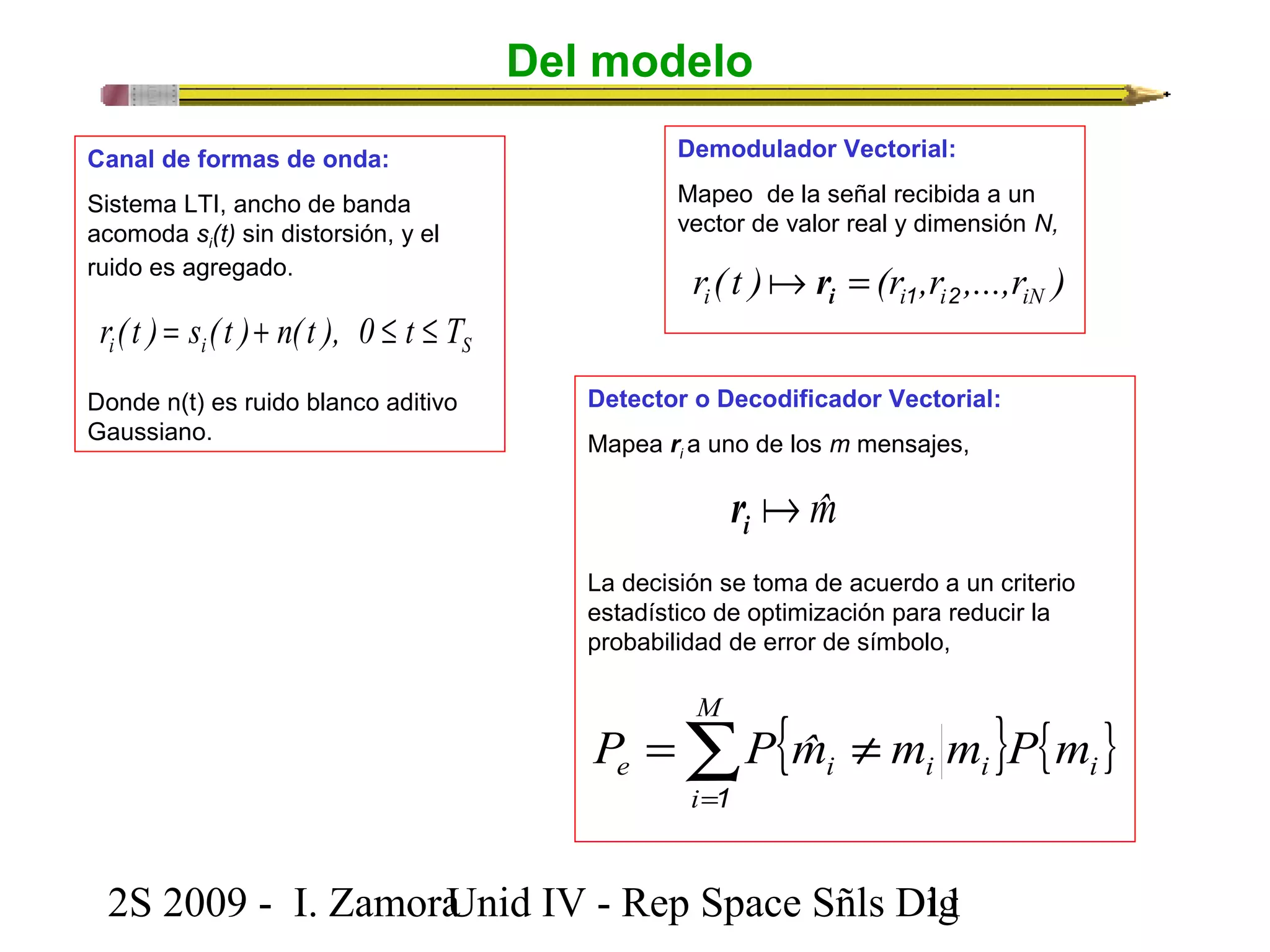
Del modelo
Canalde formas de onda:
Sistema LTI, ancho de banda
acomoda si(t) sin distorsión, y el
ruido es agregado.
i i S r ( t ) = s ( t )+ n( t ), 0 £ t £ T
Donde n(t) es ruido blanco aditivo
Gaussiano.
Demodulador Vectorial:
Mapeo de la señal recibida a un
vector de valor real y dimensión N,
r ( t ) (r ,r ,...,r ) i i1 i2 iN = i r
Detector o Decodificador Vectorial:
Mapea ri a uno de los m mensajes,
i mˆ r
La decisión se toma de acuerdo a un criterio
estadístico de optimización para reducir la
probabilidad de error de símbolo,
{ } { } i
M
P = P mˆ ¹
m m P m e i i i å=
i
1
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig1
12.
Conversión formas deonda a vectores espaciales
Producto escalar (interno o punto) de un espacio Euclideano
Considere “V” como un espacio lineal Euclideano, sobre un campo numérico
complejo “C”:
0. Notación del producto escalar, para dos vectores, a y b: < α, β >
1. Simetría: < α, β > =< α, β >, α, β Î V
2. Positivo de facto: < α,α > ³ 0, ( = 0 si α = 0)
3. Linealidad: aα bα ,β a α ,β b α ,β , α ,α ,β V,a,b C 1 2 1 2 1 2 < + >= < > + < > Î Î
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig2
13.
Conversión formas deonda a vectores espaciales
Extensión para señales de energía finita:
•Si la señal s(t) puede especificarse mediante una n-ada, entonces también es un
vector
•Espacio de Señales: Se definen n señales j1, j2, j3,..., jN, como independientes, si
satisfacen:
a a a a 0; a (constante) 1 2 3 N j j + j + j + + j = " 1 2 3 N ...
•Si toda señal si(t) de un cierto espacio de M señales, se puede representar como una
combinación lineal de n señales independientes {jj
}, entonces se tiene un espacio de
señales de N dimensiones,
N
å=
s (t) = s j (t), i = 1,2,...,M 0 £ t £
T
i ij j j 1
•Donde los coeficientes sij se obtiene como:
=< j >= ò j T
ij i j 0 i j s s (t), (t) s (t) (t)dt
NOTA: sij es la proyección de
si sobre jj
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig3
14.
Representación Espacial deSeñales
•Representación Espacial: Una vez especificadas las señales base {jj
•Producto Escalar o Interno de dos señales de valor real s(t) y y(t) sobre un intervalo
[0,T] se define como:
< >= òT
s(t), y(t) s(t)y(t)dt
0
•Norma o longitud de una señal s(t) se define como:
T 1/2
0
1/2 2 = ³ úû ù
êë é
=< > = ò
s(t) s(t),s(t) s (t)dt 2 E ( 0)
•Conjunto de señales ortogonales: Un conjunto de N forma de ondas de señales se
denomina ortogonales si,
c i j
î í ì
=
(t), (t) (t) (t)dt T j
i j 0 i j
< j j >= ò j j = 0 i ¹
j
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig4
}, podemos
representar la señal s(t) mediante una N-ada (si1, si2, si3,...,siN)
15.
Representación Espacial deSeñales
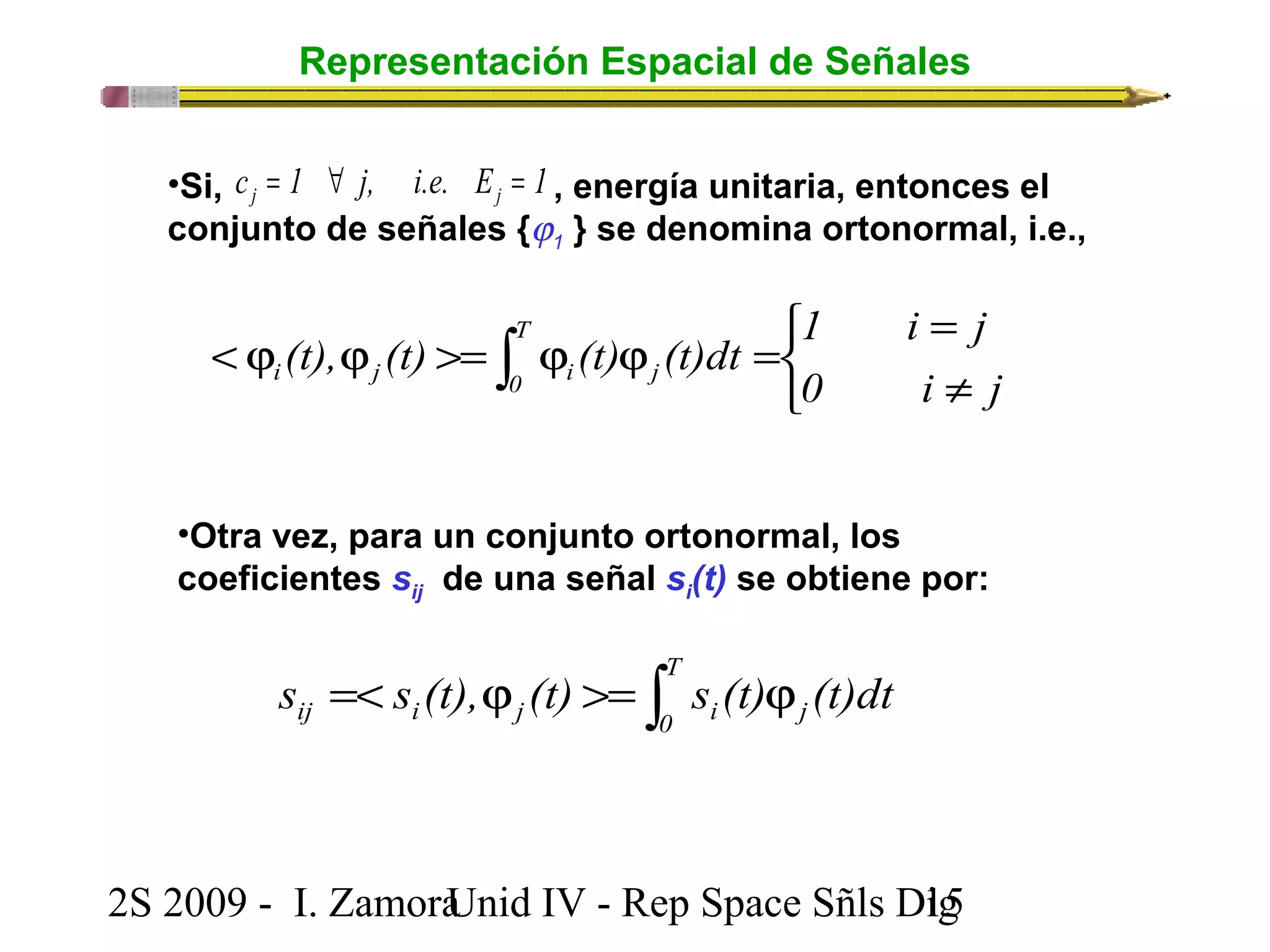
c 1 j, i.e. E 1 j j = " =
•Si, , energía unitaria, entonces el
conjunto de señales {j1 } se denomina ortonormal, i.e.,
1 i j
î í ì
=
(t), (t) (t) (t)dt T
i j 0 i j
< j j >= ò j j = 0 i ¹
j
•Otra vez, para un conjunto ortonormal, los
coeficientes sij de una señal si(t) se obtiene por:
=< j >= ò j T
ij i j 0 i j s s (t), (t) s (t) (t)dt
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig5
16.
Ilustración
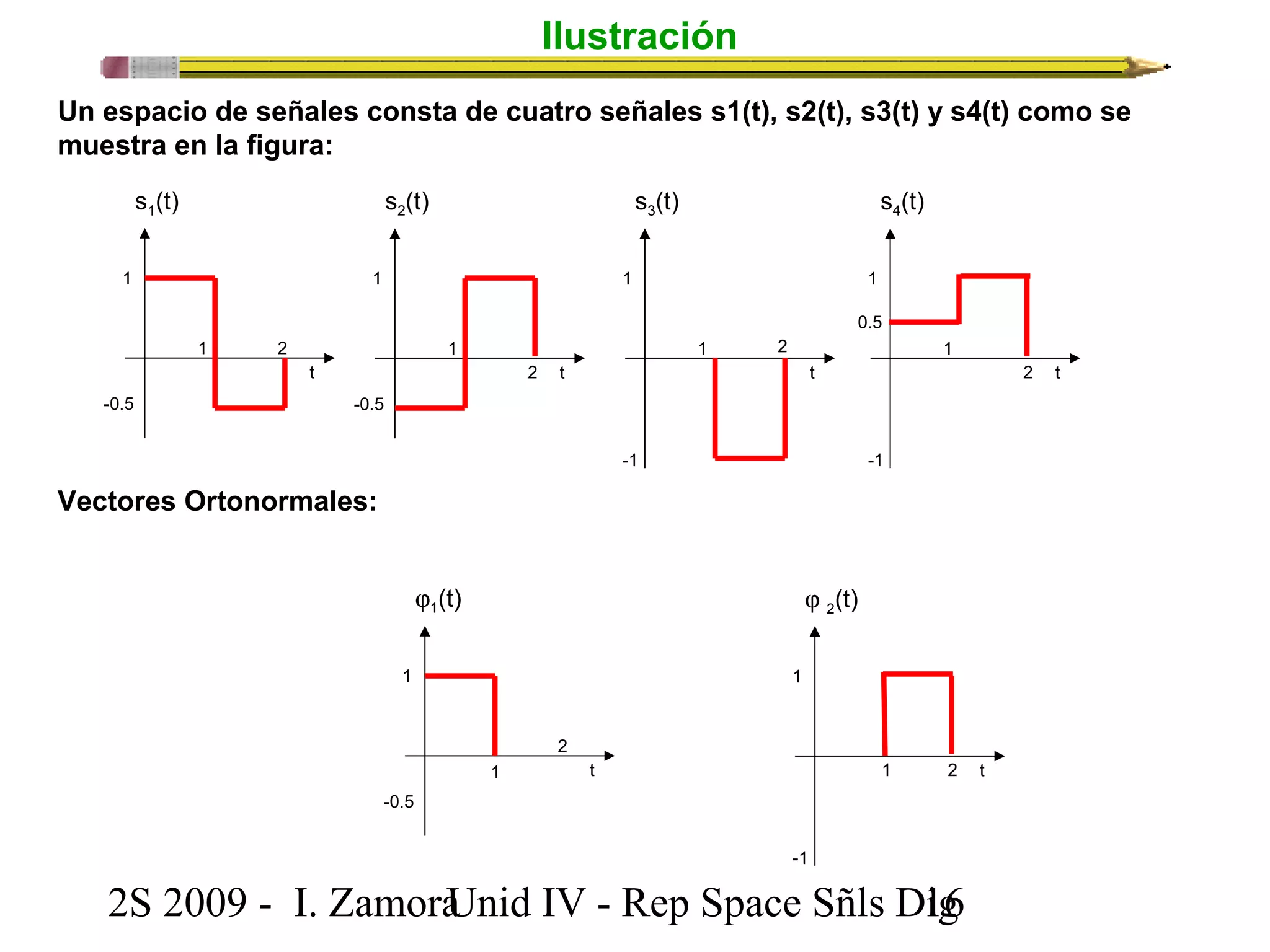
Un espaciode señales consta de cuatro señales s1(t), s2(t), s3(t) y s4(t) como se
muestra en la figura:
s1(t)
1
-0.5
1 2
t
s2(t)
1
-0.5
1
2 t
s3(t)
1
1 2
t
-1
s4(t)
1
1
0.5
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig6
2 t
-1
Vectores Ortonormales:
j1(t)
1
-0.5
1
2
t
j 2(t)
1
1 2 t
-1
17.
Ilustración
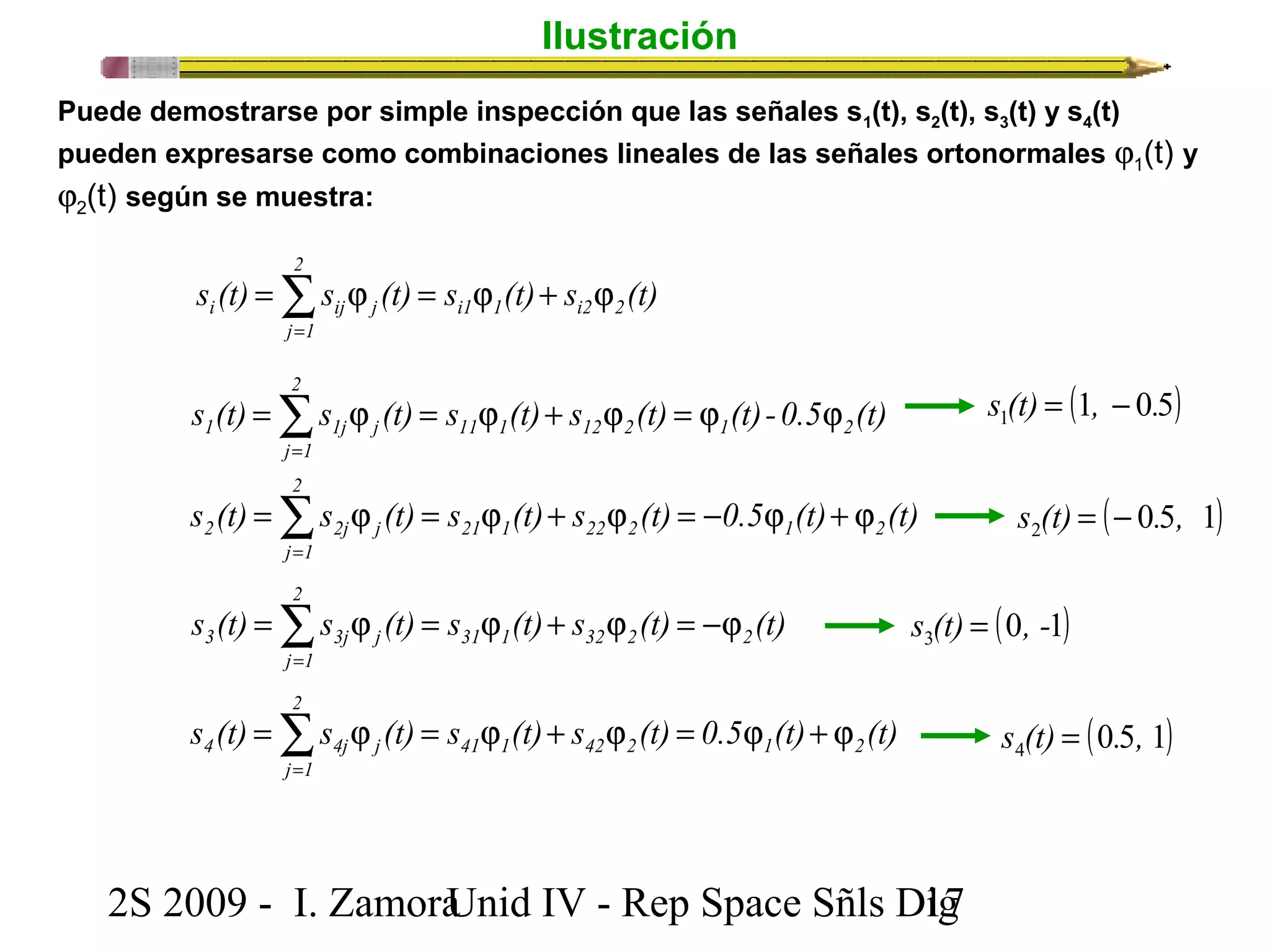
Puede demostrarsepor simple inspección que las señales s1(t), s2(t), s3(t) y s4(t)
pueden expresarse como combinaciones lineales de las señales ortonormales j1(t) y
j2(t) según se muestra:
2
i ij j j + j = j =å=
s (t) s (t) s (t) s (t) i1 1 i2 2
j 1
2
s (t) =s j (t) = s j (t) + s j (t) = j (t)-0.5 j (t) 1 1j j 11 1 12 2 1 2
j 1
2
s (t) s (t) s (t) s (t) 0.5 (t) (t) 21 1 22 2 1 å=
2
=j = j + j = - j + j 2 2j j j 1
2
s (t) s (t) s (t) s (t) (t) 31 1 32 2 å=
2
=j = j + j = - j 3 3j j j 1
2
s (t) s (t) s (t) s (t) 0.5 (t) (t) 41 1 42 2 1 å=
2
4 4j j j + j = j + j = j =å=
j 1
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig7
(1 0 5) 1 s (t) = , - .
( 0 5 1) 2 s (t) = - . ,
(0 1) 3 s (t) = , -
(0 5 1) 4 s (t) = . ,
18.
Ilustración
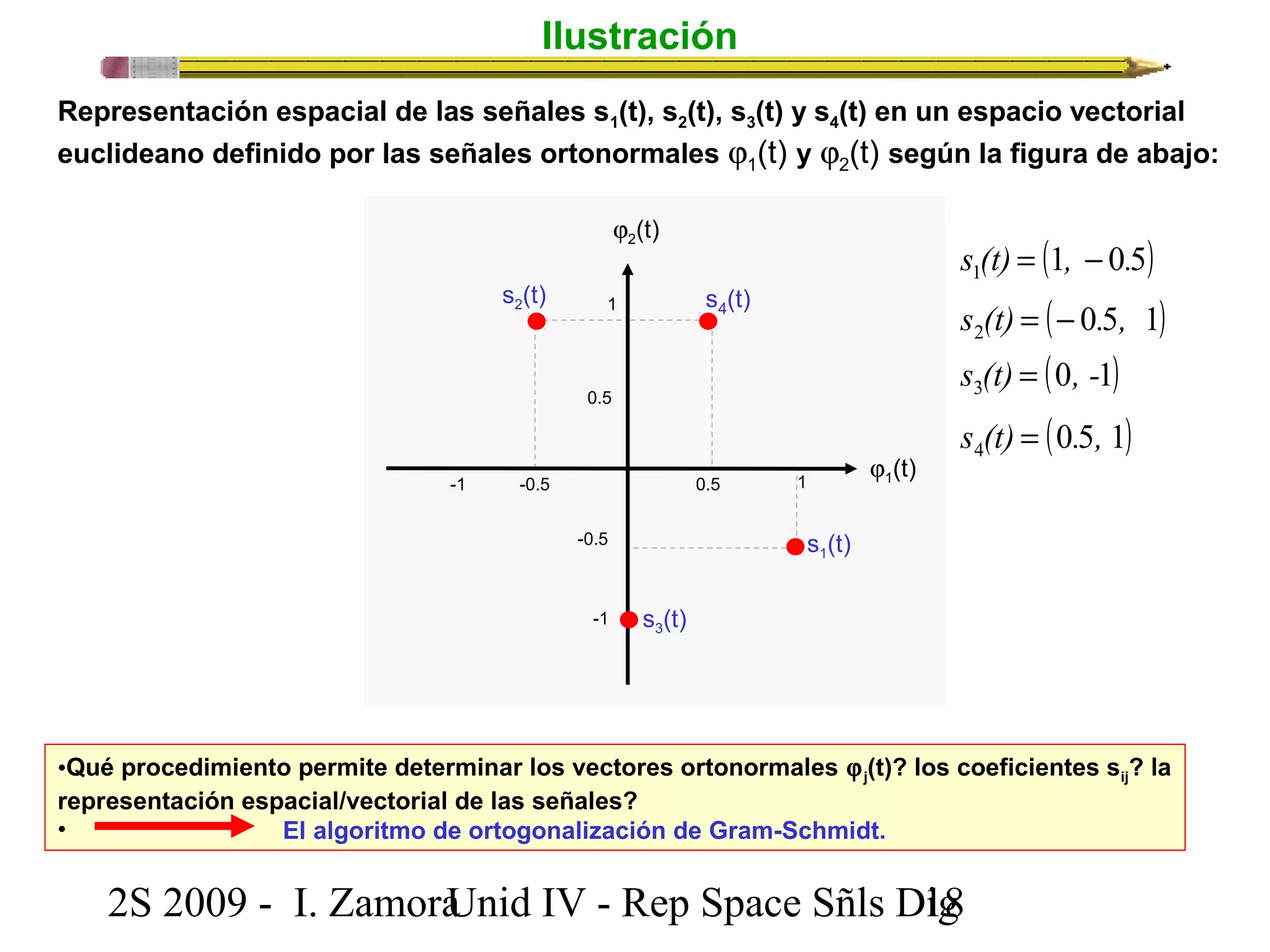
Representación espacialde las señales s1(t), s2(t), s3(t) y s4(t) en un espacio vectorial
euclideano definido por las señales ortonormales j1(t) y j2(t) según la figura de abajo:
j2(t)
s(t) 21
s4(t)
0.5
-1 -0.5 0.5 1
-0.5
-1
j1(t)
s3(t)
s1(t)
(1 0 5) 1 s (t) = , - .
( 0 5 1) 2 s (t) = - . ,
(0 1) 3 s (t) = , -
(0 5 1) 4 s (t) = . ,
•Qué procedimiento permite determinar los vectores ortonormales jj(t)? los coeficientes sij? la
representación espacial/vectorial de las señales?
• El algoritmo de ortogonalización de Gram-Schmidt.
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig8
19.
Algoritmo de OrtogonalizaciónGram-Schmidt
N
3
2
1
jjjj• Algoritmo mediante el cual se determinan las N señales
independientes y ortogonales de longitud unitaria
(ortonormales) , , ,..., , que permiten, a través
de una combinación lineal de las mismas, representar
las M señales de energía finita s1(t), s2(t), s3(t),...,sM(t) en
un espacio vectorial euclideano de N-orden.
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig9
20.
Consideraciones
• Cualquierseñal si(t) en un conjunto de M señales de energía
puede ser representada por una combinación
{s (t) 1 i M} i £ £
lineal de un conjunto { de N funciones de señales
ortonormales j (t) 1 £ j £
N} j donde N£M.
N
i ij £ £ = j =å=
s (t) s (t), i 1,2,...,M. 0 t T
j 1
j
Donde:
=< j >= ò j T
ij i j 0 i j s s (t), (t) s (t) (t)dt
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig0
21.
Consideraciones
• Noteque:
s (t) (t)dt cuyo resultado corresponde a
j
T
i
s que es la proyección de s (t) sobre (t)
ij i j
( )
ö
÷ ÷ ÷ ÷ ÷
ø
æ
ç ç ç ç ç
i i i iN 1 2
è
j
j
j
s (t) s ,s ,...,s
= ×
(t)
(t)
(t)
1
2
N
Matricialmente:
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig1
j
ò j 0
• También: ( ) i1 i2 iN = s ,s ,...,s i s
22.
Procedimiento de Gram-Schmidten detalle
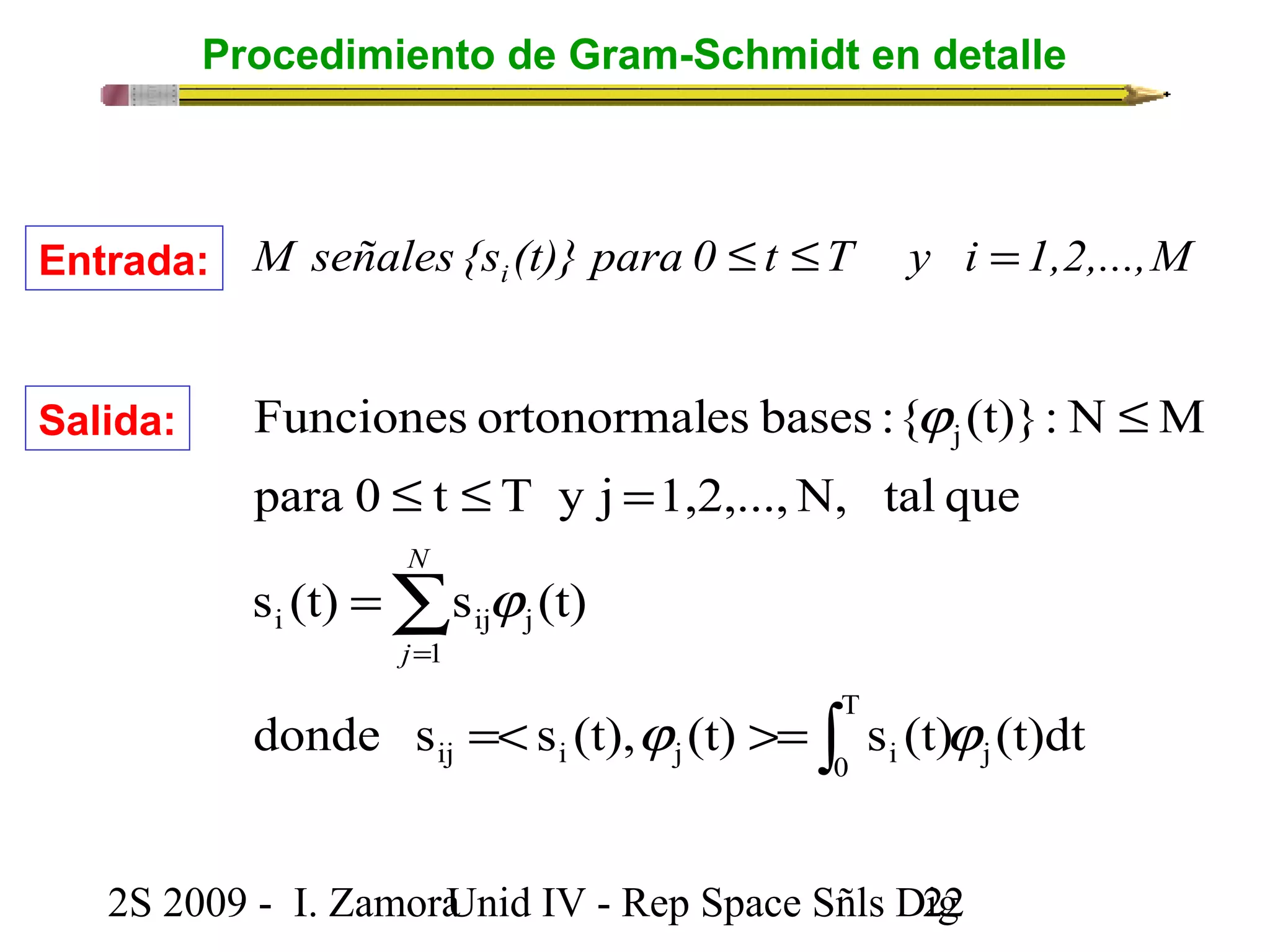
M señales {s (t)} para 0 t T y i 1,2,...,M i Entrada: £ £ =
Funciones ortonormales bases : { (t)}: N M
para 0 t T y j 1,2,...,N, tal que
N
s (t) s (t)
i ij j
1
donde s s (t), (t) s (t) (t)dt
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig2
j
T
ij i j 0 i
j
j j
j
j
ò
å
=< >=
=
£ £ =
£
=
j
Salida:
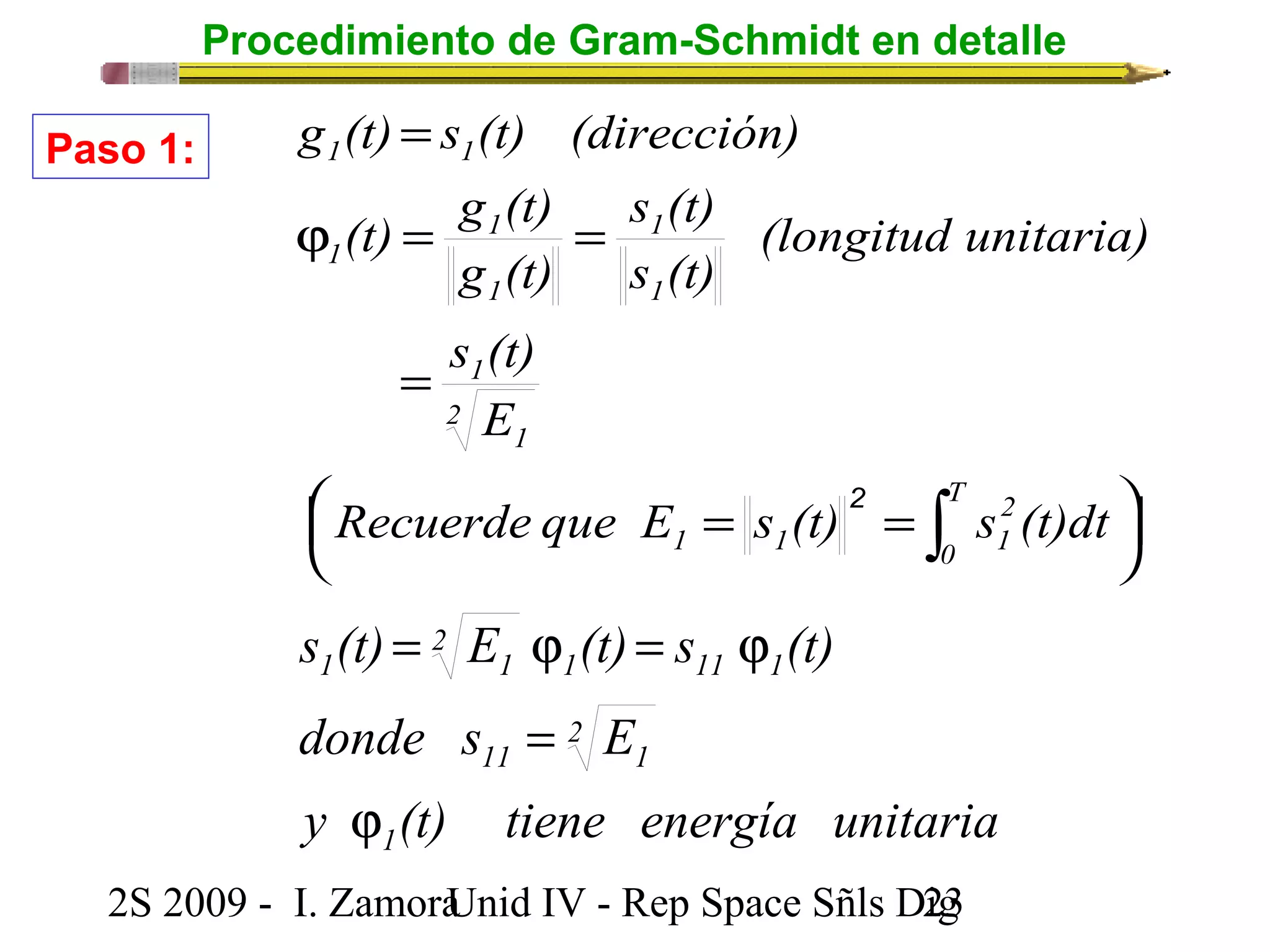
23.
Procedimiento de Gram-Schmidten detalle
g (t) =
s (t) (dirección)
1 1
(t) g (t)
j = =
s (t)
1
1
g (t)
s (t)
E
(longitud unitaria)
s (t)
2
s (t) = E j (t) = s j
(t)
1 11 1
donde s E
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig3
÷ø ö
çè æ
= =
=
òT
0
2
1 1 1
2
1
1
1
1
1
Recuerde que E s (t) s (t)dt
Paso 1:
y (t) tiene energía unitaria
1
2
11 1
2
1 1
j
=
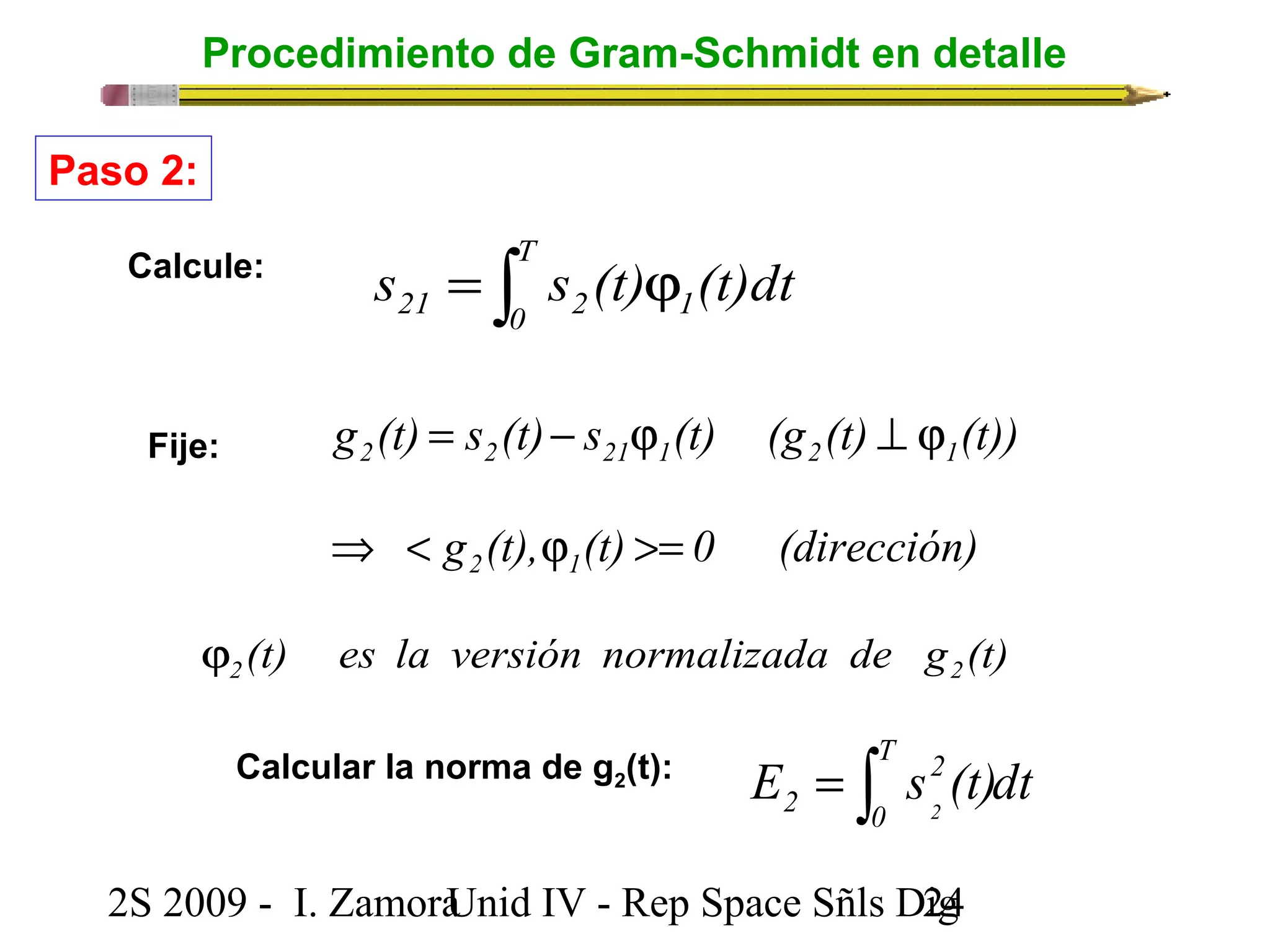
24.
Procedimiento de Gram-Schmidten detalle
= ò j T
21 0 2 1s s (t) (t)dt
g (t) s (t) s (t) (g (t) (t)) 2 2 21 1 2 1 = - j ^ j
g (t), (t) 0 (dirección) 2 1 Þ < j >=
Calcule:
Fije:
(t) es la versión normalizada de g (t) 2 2 j
Paso 2:
E s (t)dt T
Calcular la norma de g2(t): = 2 ò
0
2 2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig4
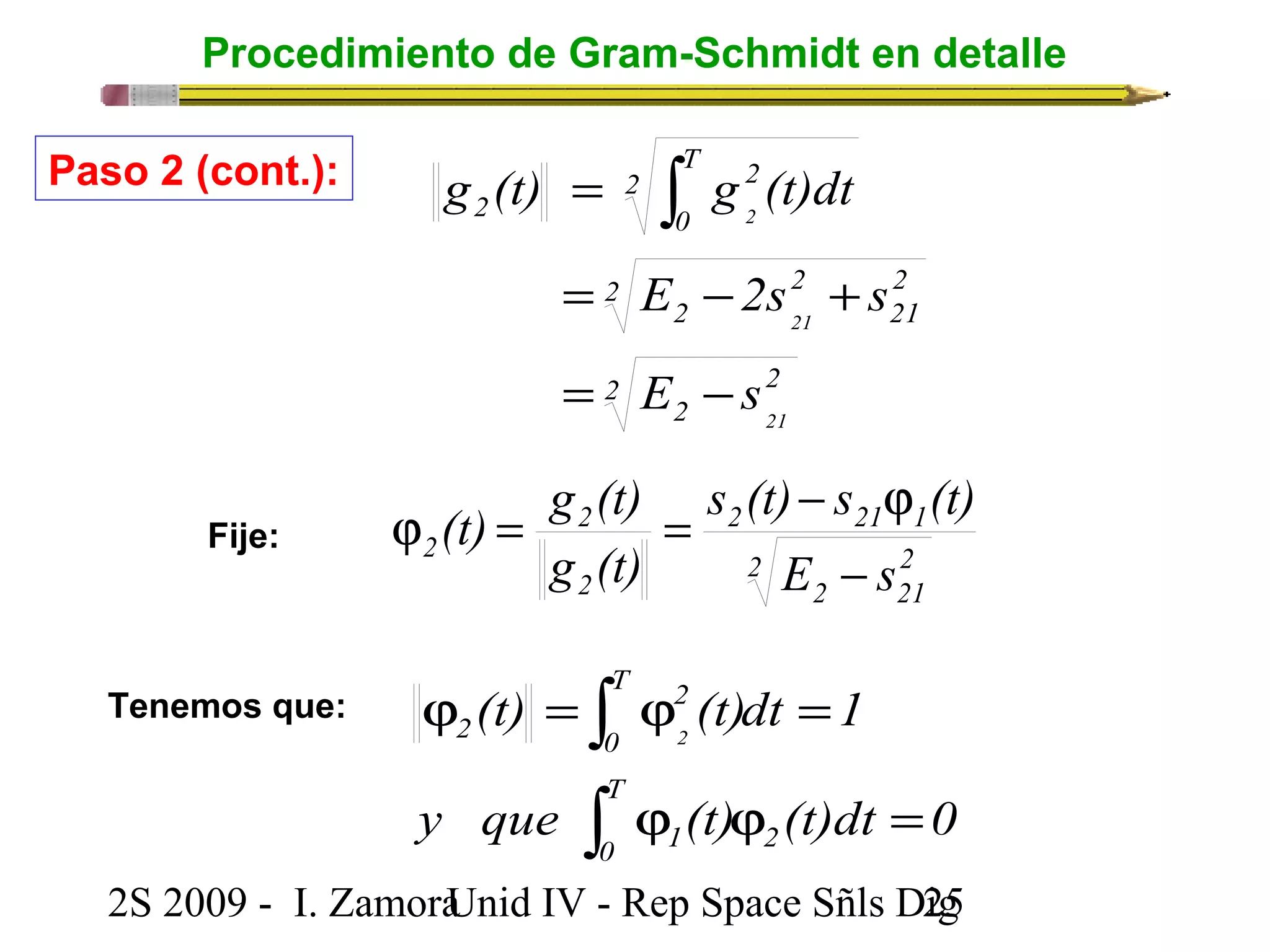
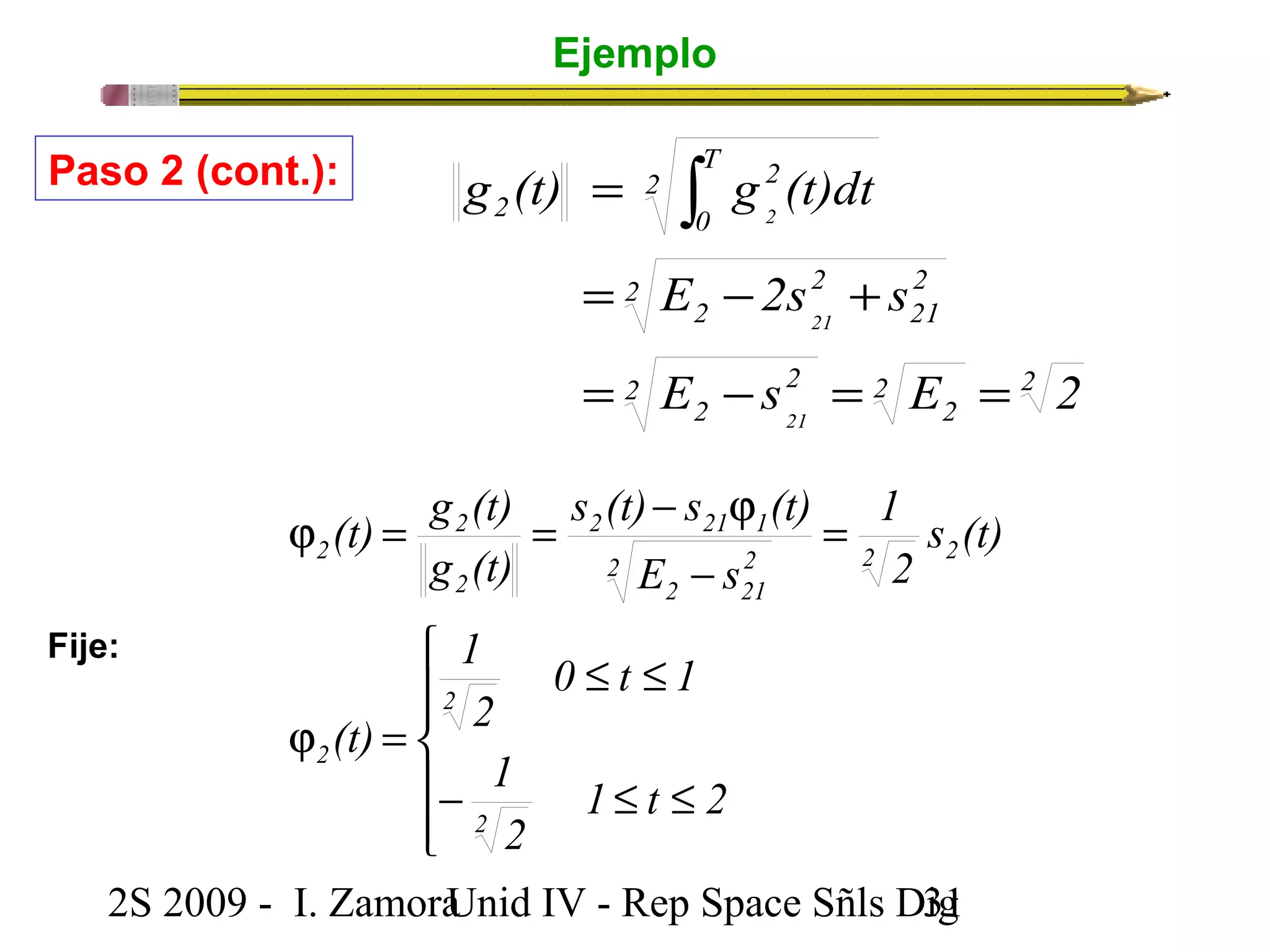
25.
Procedimiento de Gram-Schmidten detalle
Paso 2 (cont.): = ò
g (t) 2
g (t)dt
T
0
2
2
2 2
E 2s s
= - +
2
2 2
21
2
21
21
E s
= -
s (t) s (t)
2
2
j = = - j
2 21 1
(t) g (t)
2 E s
2 2
-
2 21
2
g (t)
2
Fije:
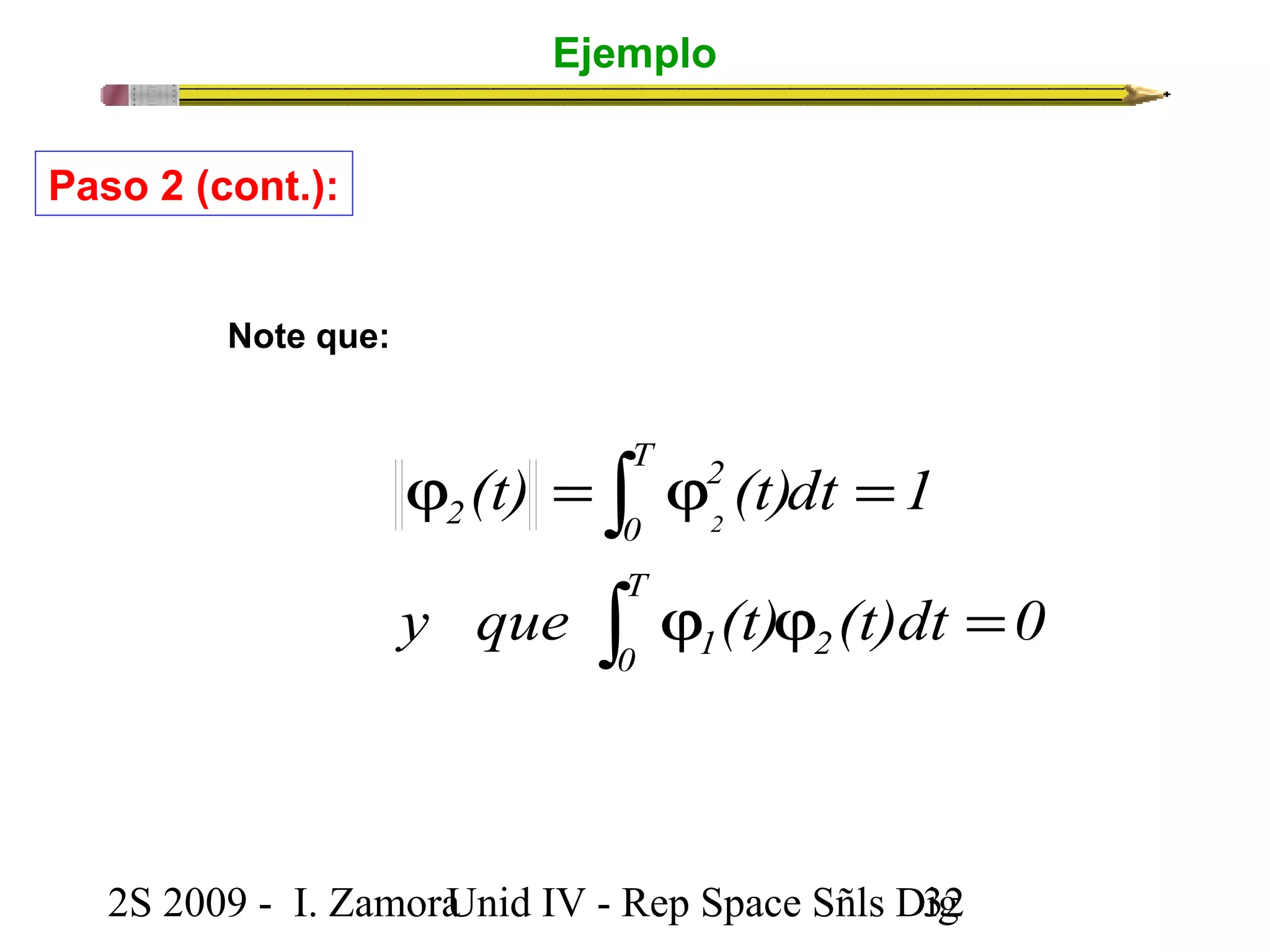
T
0
2
Tenemos que: ò
(t) (t)dt 1
j = j =
2 2
T
0 1
ò
y que j (t) j (t)dt =
0
2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig5
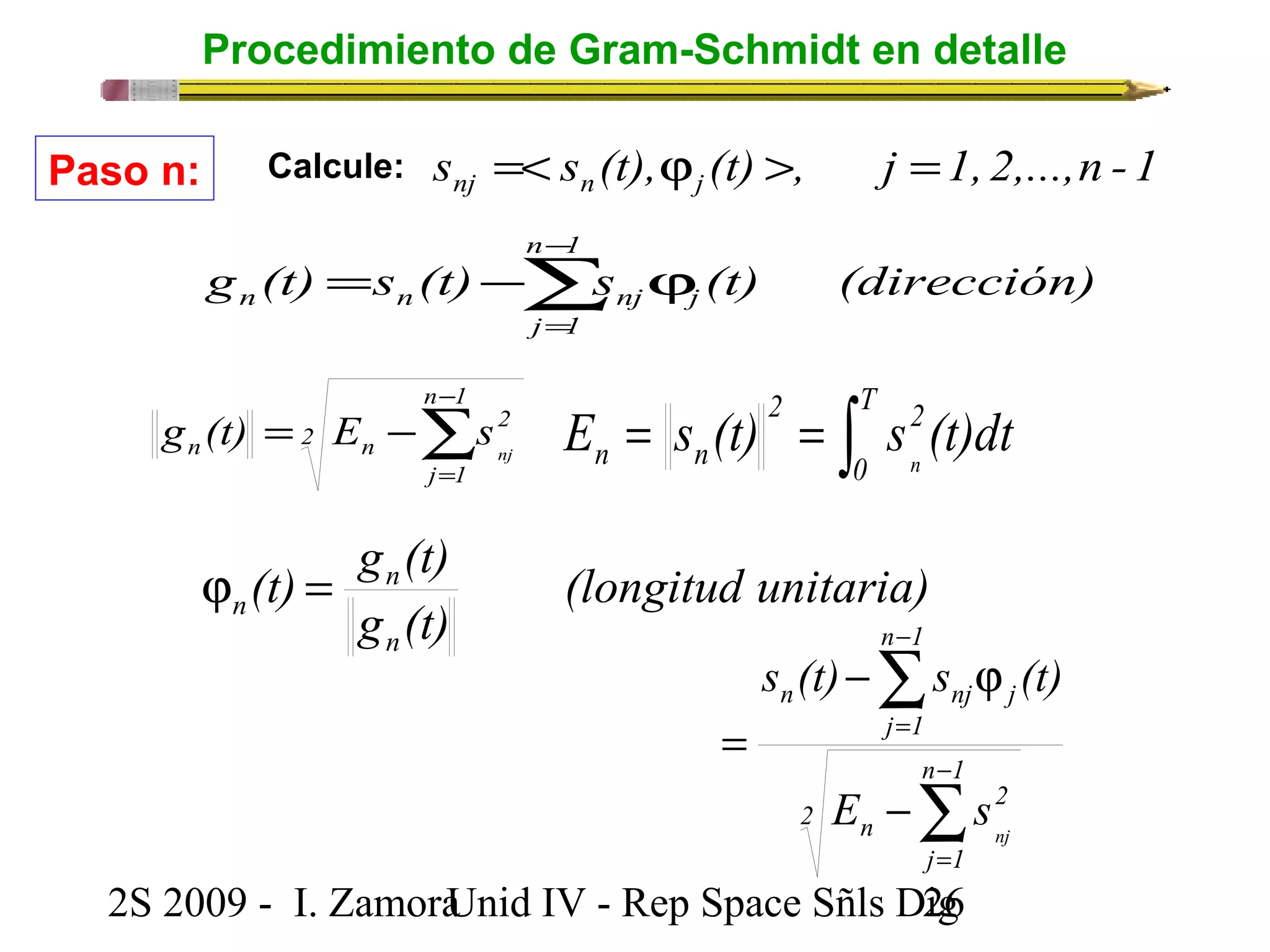
26.
Procedimiento de Gram-Schmidten detalle
s s (t), (t) , j 1, 2,...,n -1 nj n j =< j > =
Paso n: Calcule:
j nj n n å-
g (t) = s (t) - s j
(t) (dirección)
g (t) = E -
s n 2
n nj å-
n 1
j 1
2
=
= = òT
2 2
n n E s (t) s (t)dt n
0
(longitud unitaria)
(t) g (t)
n
g (t)
n
n j =
å
s (t) - s j
(t)
n nj j
n -
1
E s
2
j 1
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig6
2
n
n 1
j 1
nj å
=
-
=
-
=
n 1
j =
1
27.
Procedimiento de Gram-Schmidten detalle
Este procedimiento se continúa hasta que todas las señales
s (t),s (t),...,s (t) son procesadas.
n 1
1 2 M
= j =å-
Puede suceder que s (t) s (t) 0.
n nj j
j =
1
De este modo, j (t) =
0 ya que s (t) no tiene
n n
componente que no haya sido ya considerada por
una combinación de j (t), j (t),..., j
(t). En este
1 2 n-1
caso, simplemente ignore cualquier señal s (t) que
dé j (t) =
0.
n
n
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig7
28.
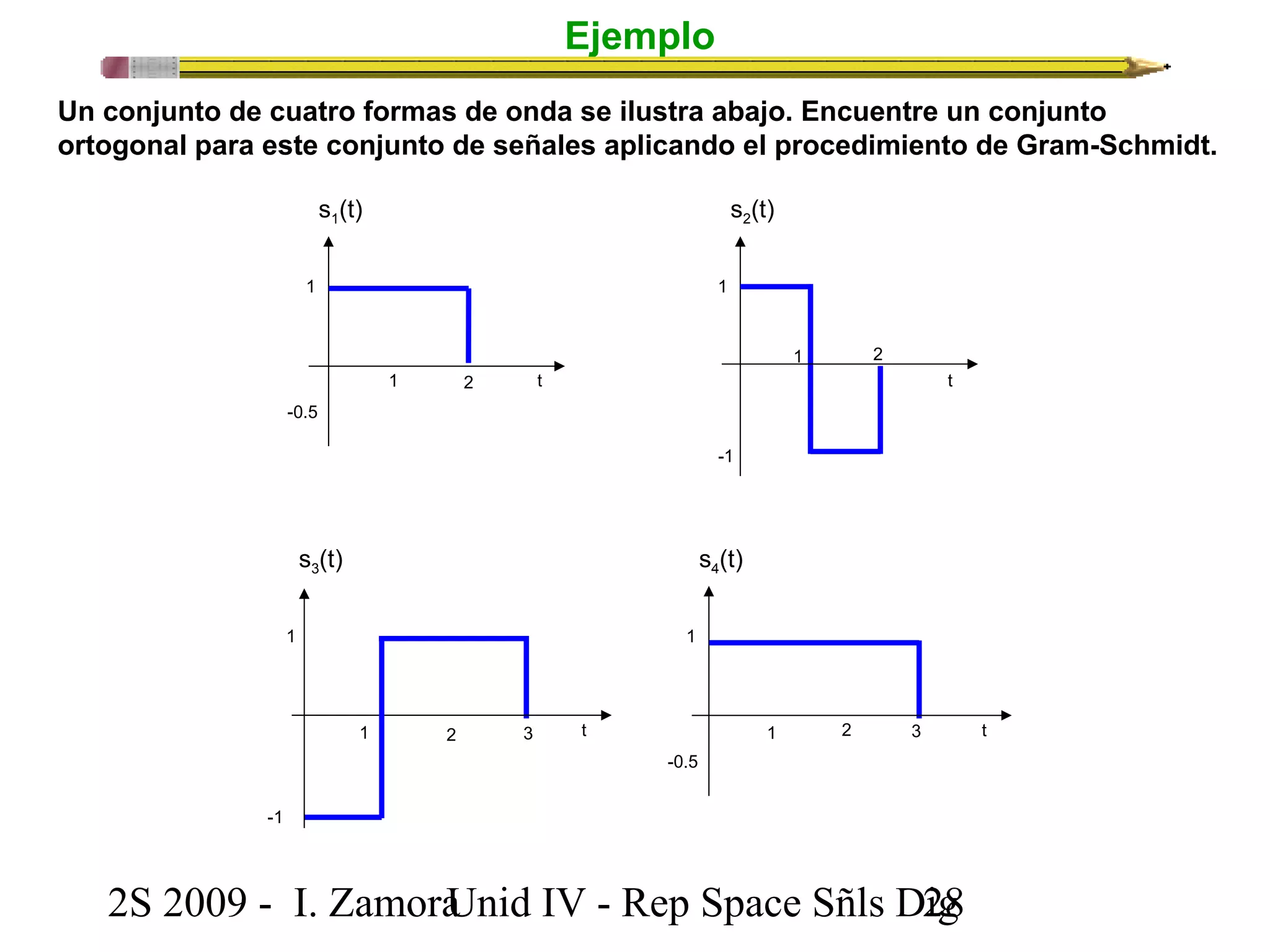
Ejemplo
Un conjuntode cuatro formas de onda se ilustra abajo. Encuentre un conjunto
ortogonal para este conjunto de señales aplicando el procedimiento de Gram-Schmidt.
s1(t)
1
-0.5
1 2 t
s2(t)
1
-1
s4(t)
1
-0.5
1 2
t
1 2 3 t
s3(t)
1
-1
1 2 3 t
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig8
29.
Ejemplo
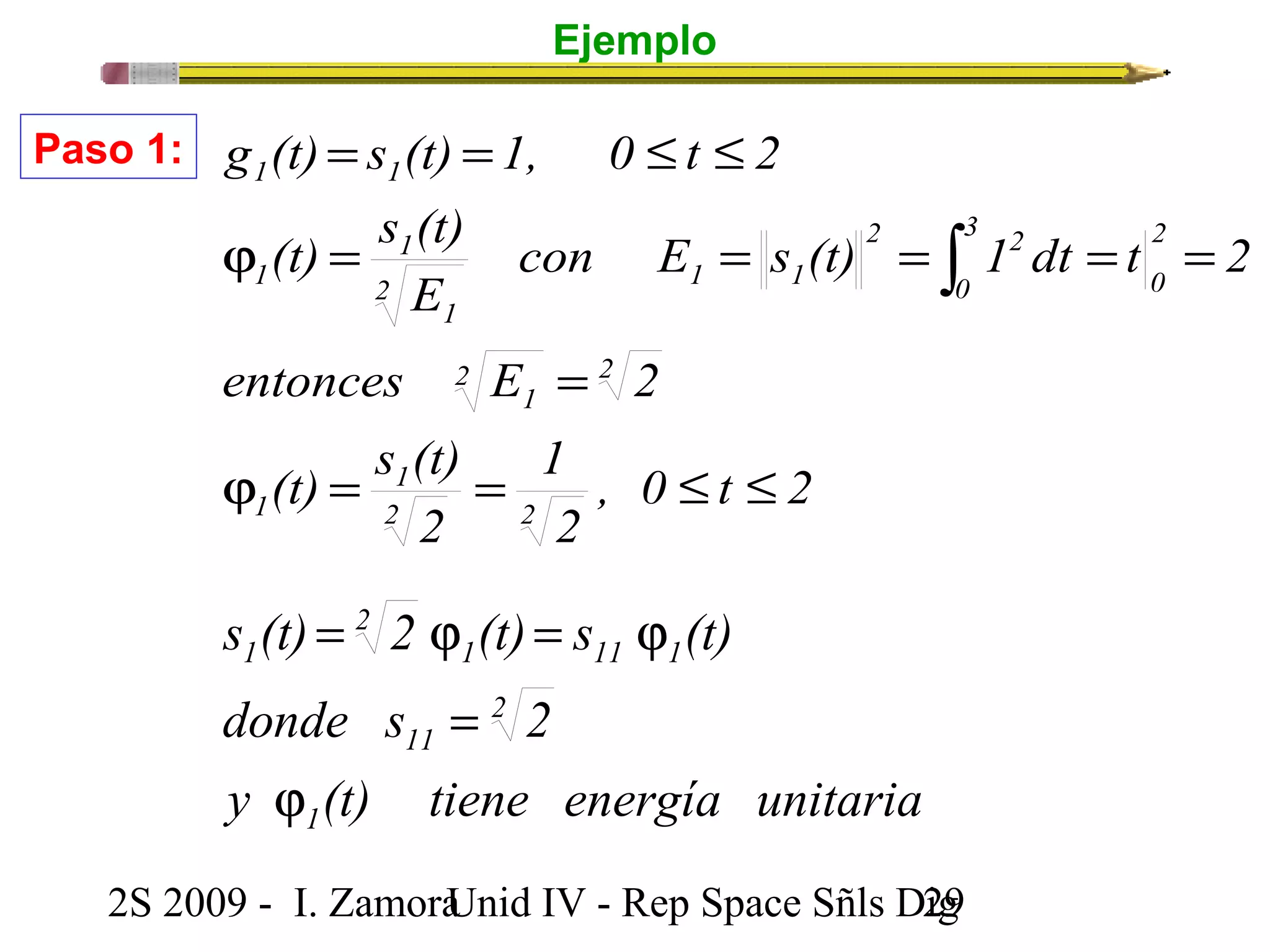
g (t)s (t) 1, 0 t 2
3
0
= = £ £
con E s (t) 1 dt t 2
1 1
(t) s (t)
j = = = = =
E
entonces 2 E =
2
2
1
, 0 t 2
2
(t) s (t)
2
1
1
2 2
1
s (t) = 2 j (t) = s j
(t)
donde s 2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D2ig9
2
0
2 2
2 1 1
1
1
1
j = = £ £
ò
Paso 1:
y (t) tiene energía unitaria
1
2
11
1 11 1
2
1
j
=
30.
Ejemplo
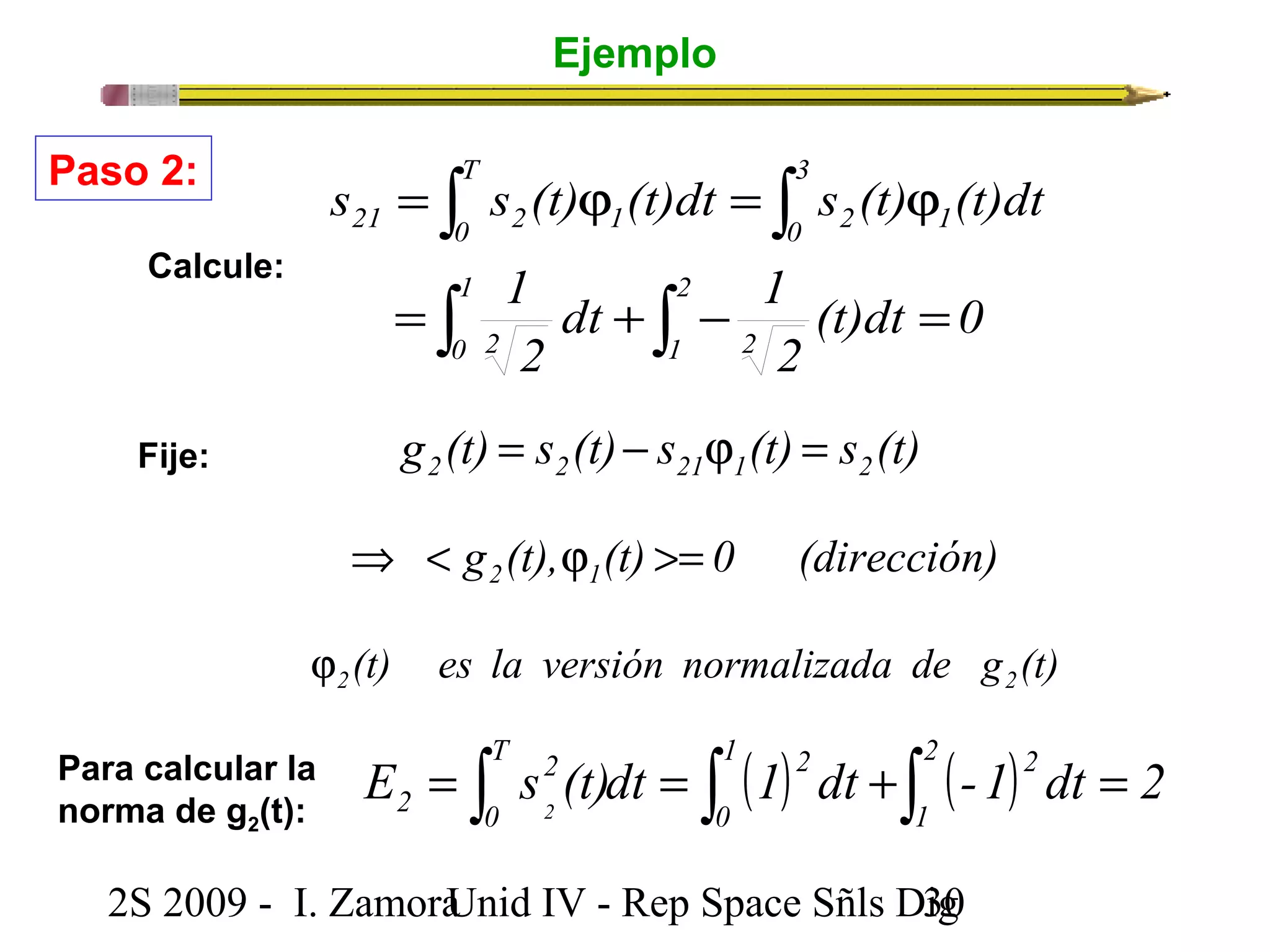
ò òPaso 2:
3
0 2 1
T
s s (t) (t)dt s (t) (t)dt
= j = j
ò ò
21 0 2 1
= 1
+ - =
dt 1
2
(t)dt 0
2
2
1 2
1
0 2
g (t) s (t) s (t) s (t) 2 2 21 1 2 = - j =
g (t), (t) 0 (dirección) 2 1 Þ < j >=
(t) es la versión normalizada de g (t) 2 2 j
Calcule:
Fije:
E s (t)dt (1) dt (-1) dt 2 2
T 2
0
1 2
0
Para calcular la = 2
= =
norma de g2(t):
2 ò ò +ò 2 1
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig0
31.
Ejemplo
Paso 2(cont.): = ò
g (t) 2
g (t)dt
T
0
2
2
2 2
E 2s s
= - +
2
2 2
21
E s E 2
= - = =
2
2
21
s (t) s (t)
2
(t) g (t)
j = = - j
2
g (t)
ì
ï ïî
ï ïí
2 21 1
21
2 2
2
2 2 2 2
E s
2 21
0 £ t £
1
-
1 t 2
2
1
2
1
2
- £ £
(t)
2
j =
=
2
1
s (t)
2
2
2
Fije:
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig1
32.
Ejemplo
Paso 2(cont.):
T
0
2
ò
(t) (t)dt 1
j = j =
2 2
T
0 1
ò
y que j (t) j (t)dt =
0
2
Note que:
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig2
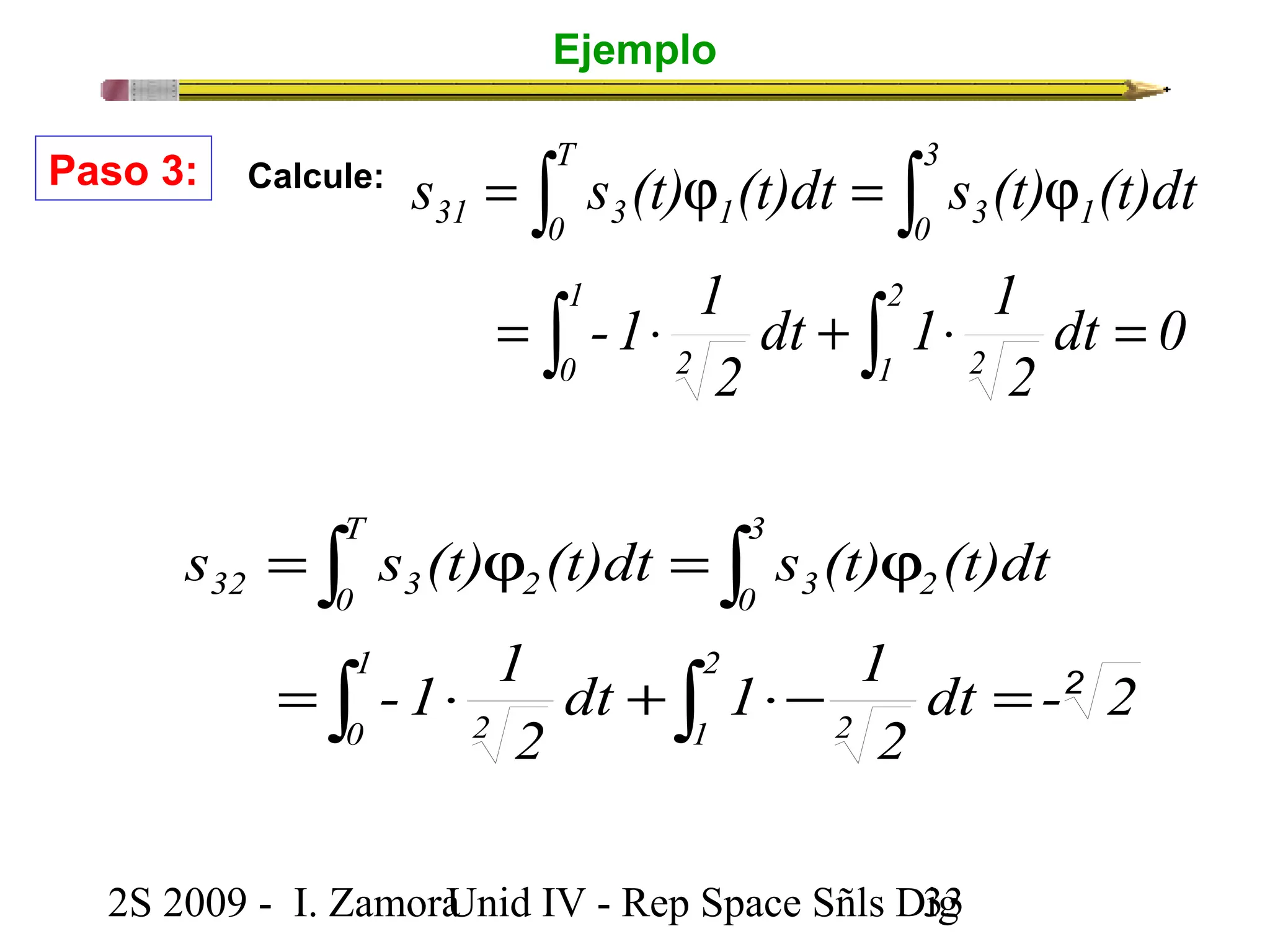
33.
Ejemplo
ò ò
s s (t) (t)dt s (t) (t)dt
= j = j
ò ò
dt 1 1
2
3
0 3 2
Paso 3: Calcule:
T
ò ò
s s (t) (t)dt s (t) (t)dt
= j = j
ò ò
32 0 3 2
= × + ×- =
-1 1
dt 1 1
2
dt -2 2
2
2
1 2
1
0 2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig3
dt 0
2
-1 1
2
1 2
1
0 2
3
0 3 1
T
31 0 3 1
= × + × =
34.
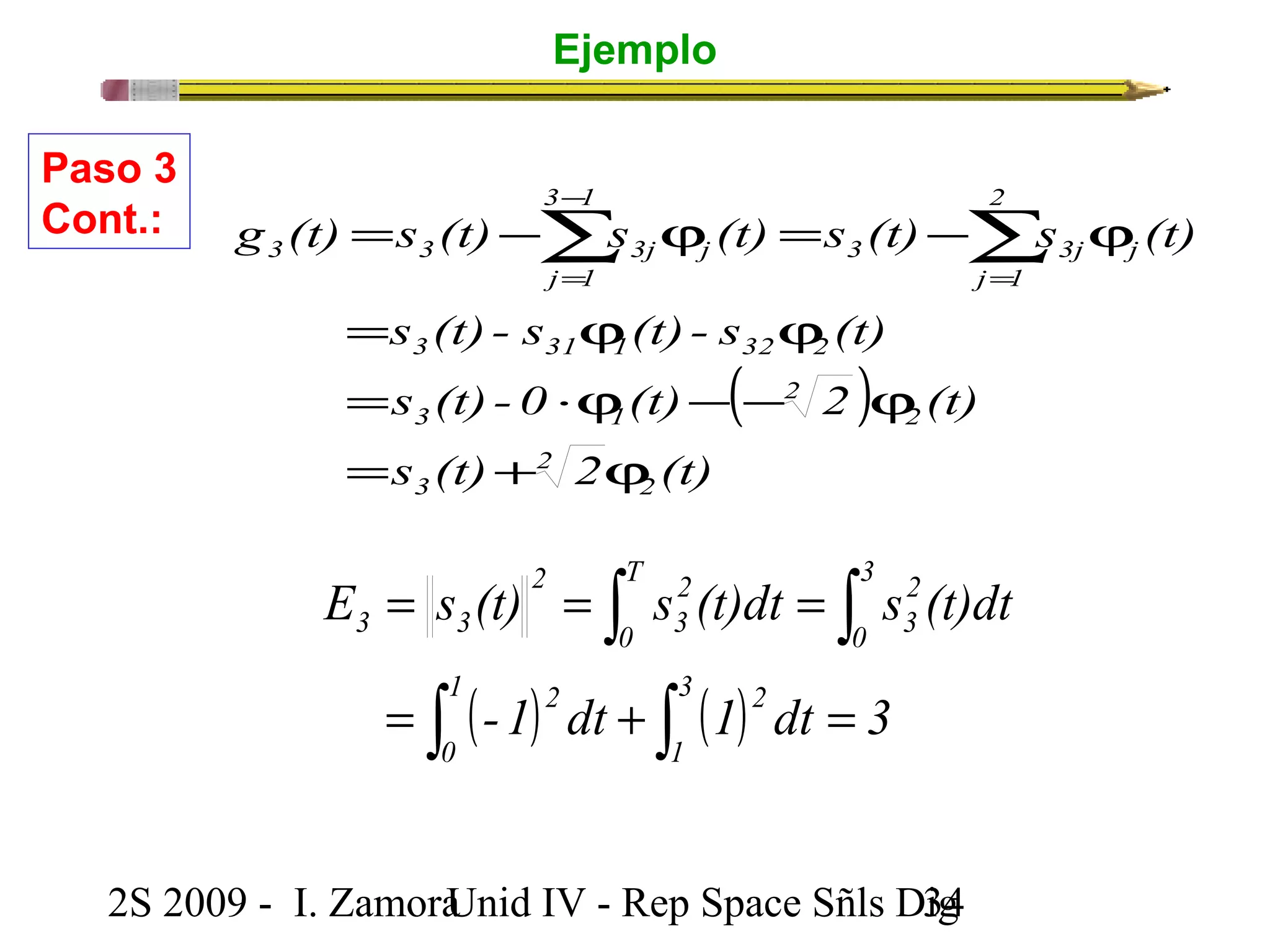
Ejemplo
= -åj = -å j
g (t) s (t) s (t) s (t) s (t)
3 3j j
3 3 3j j
s (t) - s (t) - s (t)
= j j
3 31 1 32 2
( )
s (t) -0 (t) 2 (t)
= ×j - - j
3
0
3 1
s (t) 2 (t)
2
T
0
2
ò 2
3
ò
2
2
3
2
E = s (t) = s (t)dt =
s (t)dt
3 3
ò ( ) ò ( )
1 2
3
2
0
1
-1 dt 1 dt 3
= + =
2
3
Paso 3
Cont.:
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig4
2
j 1
3 1
j 1
= + j
=
-
=
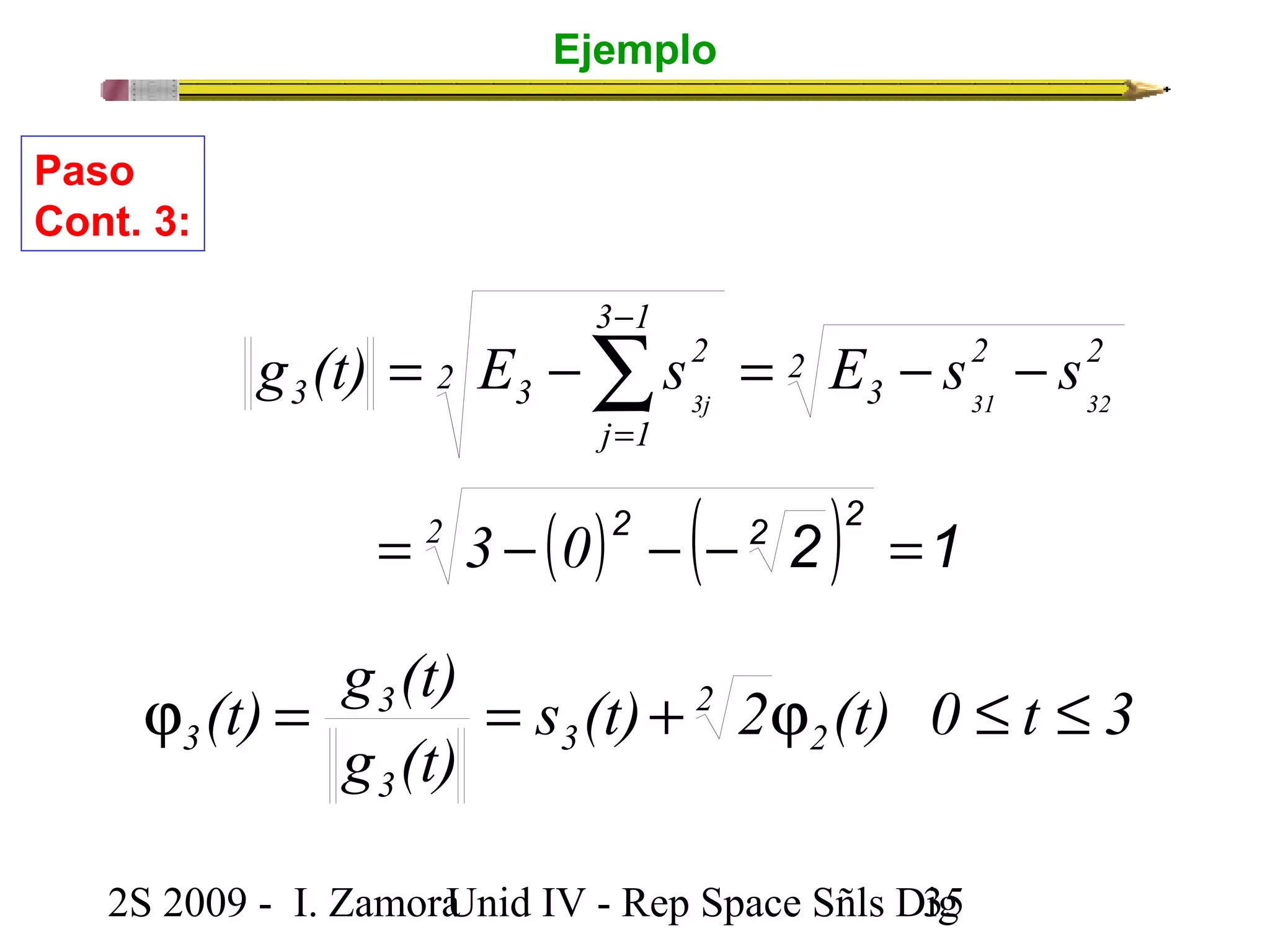
35.
Ejemplo
3 1
= - 2
= - - å-
g (t) 2 E s E s s3j 3
31 32
j =
1
2 2 2
3 3
= 2
3 - ( 0
) 2 - ( - 2 2 ) 2 =
1 (t) g (t) 2
s (t) 2 (t) 0 t 3
Paso
Cont. 3:
j = 3
= + j £ £
3 g (t)
2
3
3
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig5
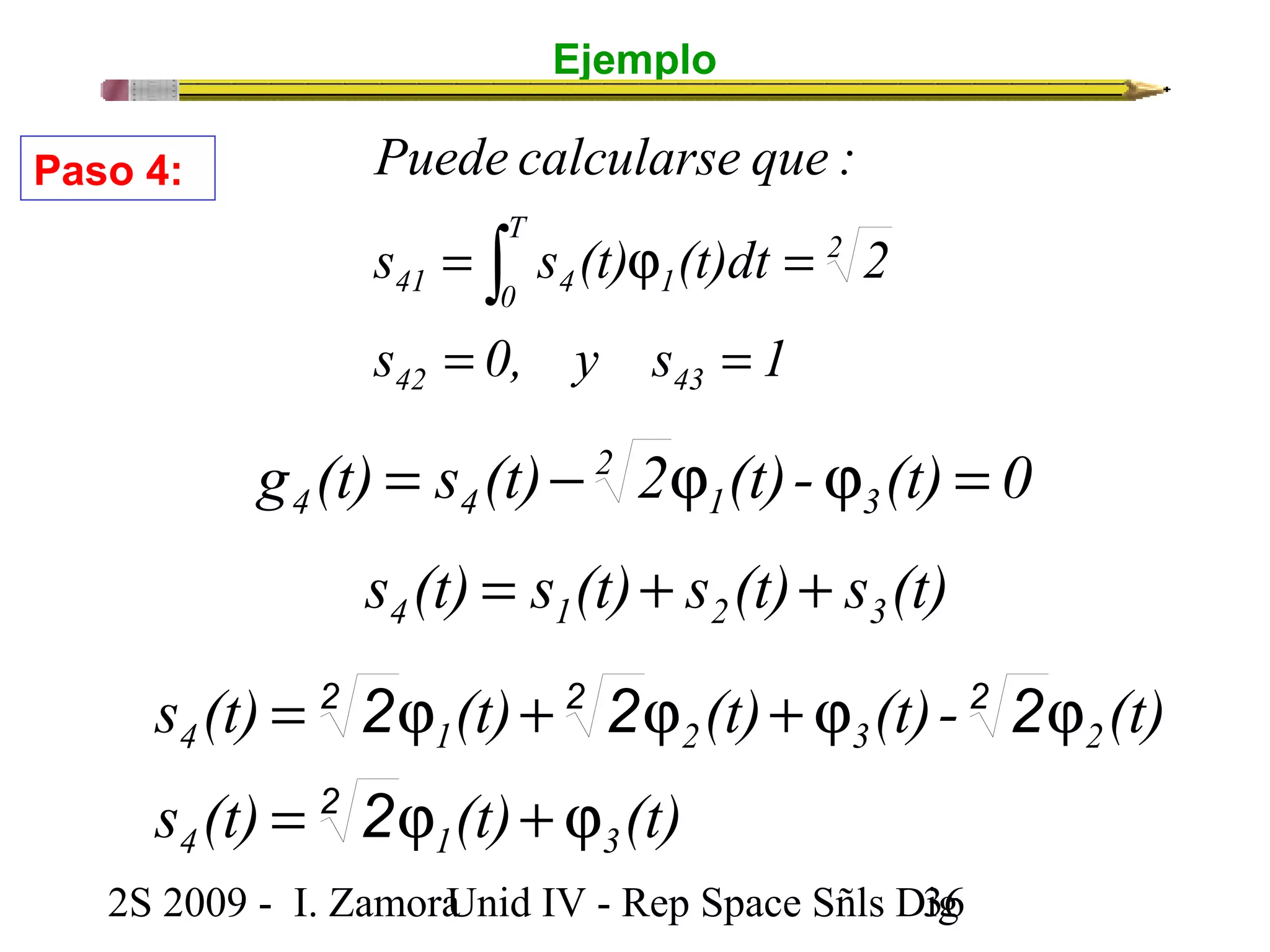
36.
Ejemplo
Puede calcularseque :
T
0
= ò j =
s s (t) (t)dt 2
41 4 1
= =
s 0, y s 1
42 43
2
g (t) = s (t) - 2
2 j (t)- j (t) =
0 4 4 1 3
s (t) s (t) s (t) s (t) 4 1 2 3 = + +
Paso 4:
2 2 2
s (t) (t) (t) (t)- (t)
= j + j + j j
2
2 2 2
2
4 1 2 3 2
s (t) = j (t) + j
(t)
4 1 3
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig6
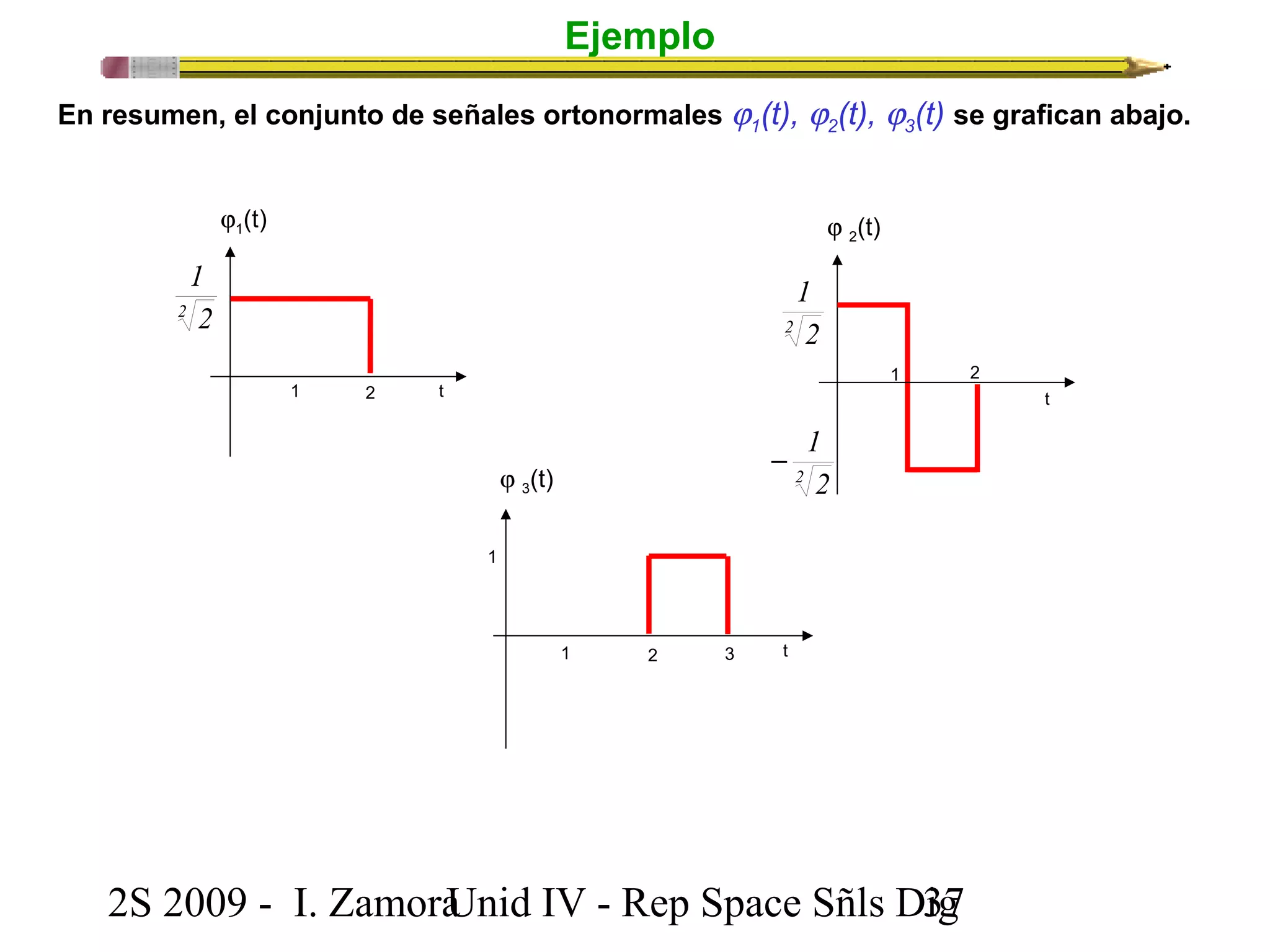
37.
Ejemplo
En resumen,el conjunto de señales ortonormales j1(t), j2(t), j3(t) se grafican abajo.
j1(t)
1 2 t
j 2(t)
1 2
1
1
- 1
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig7
t
j 3(t)
1
1 2 3 t
2 2
2 2
2 2
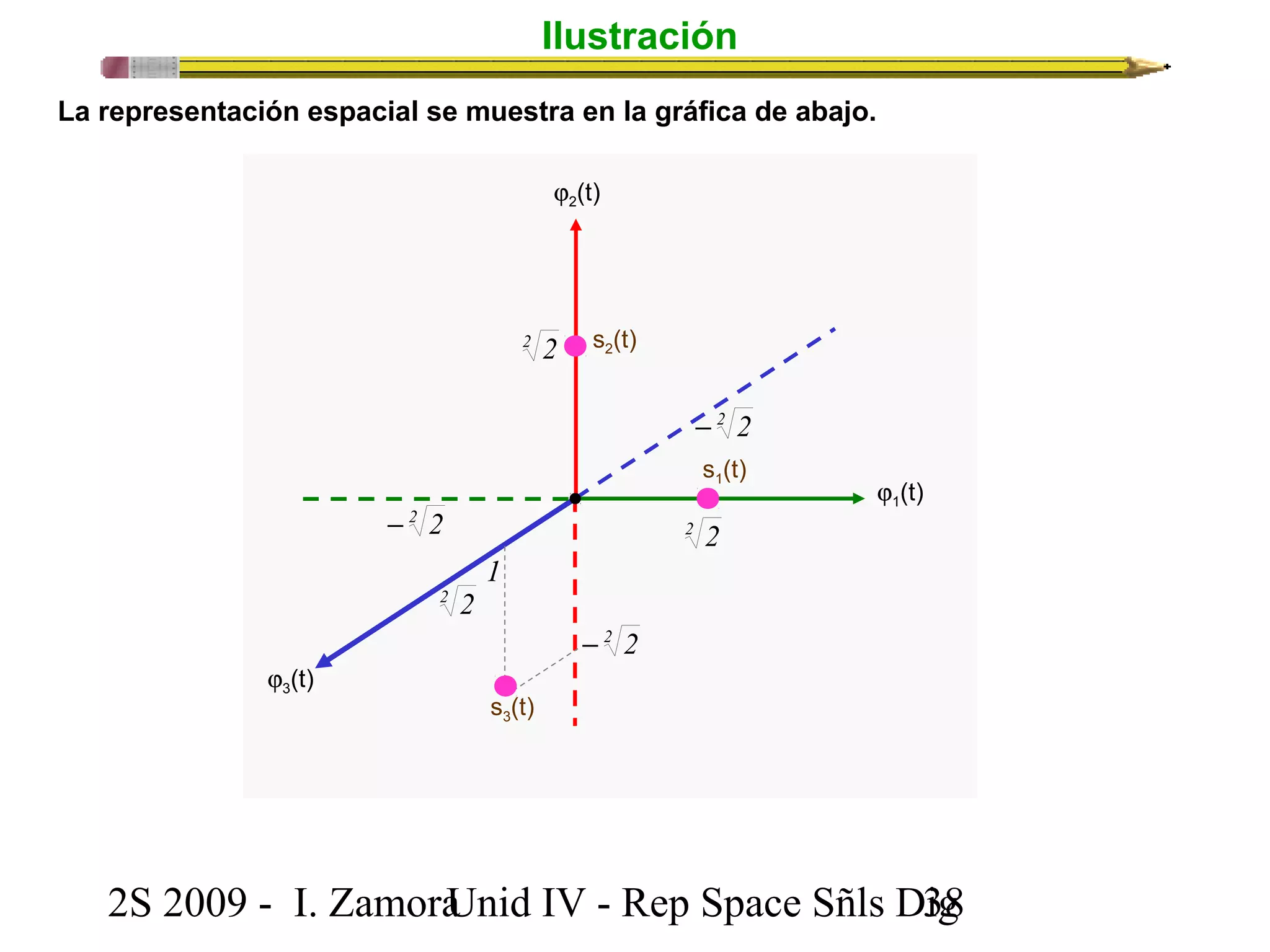
38.
Ilustración
La representaciónespacial se muestra en la gráfica de abajo.
j2(t)
j1(t)
s2(t)
2 2
- 2 2
- 2 2 2 2
1
s3(t)
s1(t)
j3(t)
2 2
- 2 2
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D3ig8
39.
2S 2009 -I. ZamoraU n i d IV - Rep Space Sñls D3ig9
![Representación Espacial de Señales
•Representación Espacial: Una vez especificadas las señales base {jj
•Producto Escalar o Interno de dos señales de valor real s(t) y y(t) sobre un intervalo
[0,T] se define como:
< >= òT
s(t), y(t) s(t)y(t)dt
0
•Norma o longitud de una señal s(t) se define como:
T 1/2
0
1/2 2 = ³ úû ù
êë é
=< > = ò
s(t) s(t),s(t) s (t)dt 2 E ( 0)
•Conjunto de señales ortogonales: Un conjunto de N forma de ondas de señales se
denomina ortogonales si,
c i j
î í ì
=
(t), (t) (t) (t)dt T j
i j 0 i j
< j j >= ò j j = 0 i ¹
j
2S 2009 - I. ZamoraU n i d IV - Rep Space Sñls D1ig4
}, podemos
representar la señal s(t) mediante una N-ada (si1, si2, si3,...,siN)](https://image.slidesharecdn.com/lecture12representacinespacialdeseales-141021121838-conversion-gate02/75/Lecture-12-representacion-espacial-de-senales-14-2048.jpg)