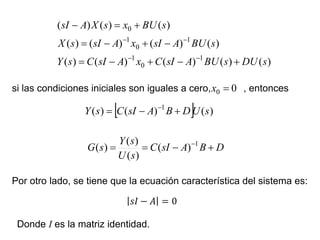
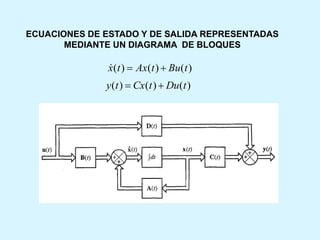
El documento describe los métodos de representación en espacio de estado y función de transferencia para modelar sistemas dinámicos. La representación en espacio de estado puede modelar sistemas lineales o no lineales, con múltiples entradas y salidas, y condiciones iniciales distintas de cero. Se definen conceptos como variables de estado, vector de estado y ecuaciones de estado. Finalmente, se muestra cómo obtener la representación en espacio de estado a partir de la función de transferencia de un sistema.




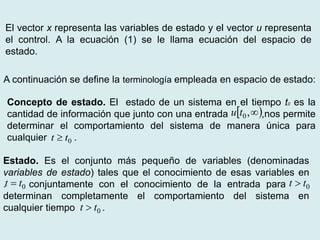
![Variables de estado. conjunto más pequeño de variables que
determinan el estado de un sistema dinámico. Si se requieren al
menos n variables ( ) para describir completamente el
comportamiento de un sistema dinámico, se dice que el sistema
es de orden n.
n
x
x
x ,...,
, 2
1
Vector de estado. Las n variables de estado forman el vector de
estado, que generalmente es un vector columna de dimensión
[n x 1]. Donde n es el número de variables de estado.](https://image.slidesharecdn.com/variabledeestado-230208033924-f3b3590a/85/Variable-de-estado-pdf-7-320.jpg)






![Sepuede utilizar Matlab.
Ejemplo 3:
s
s
s
s
s
s
s
U
s
Y
20
5
17
5
4
)
(
)
(
2
3
4
2
3
>> num=[1 4 0 5];
>> den=[1 17 5 20 0];
>> [A,B,C,D]=tf2ss(num,den)
Utilizando:](https://image.slidesharecdn.com/variabledeestado-230208033924-f3b3590a/85/Variable-de-estado-pdf-15-320.jpg)