
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a SESION DE APRENDIZAJE DE ROBOTICA
Similar a SESION DE APRENDIZAJE DE ROBOTICA (20)
Último
Último (20)
SESION DE APRENDIZAJE DE ROBOTICA
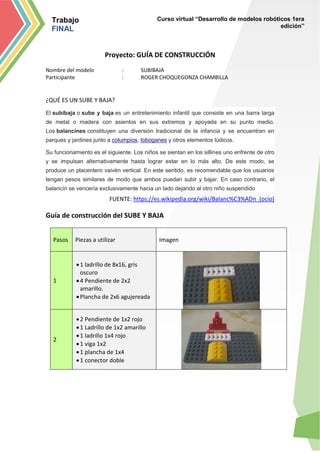
- 1. Trabajo FINAL Curso virtual “Desarrollo de modelos robóticos 1era edición” Proyecto: GUÍA DE CONSTRUCCIÓN Nombre del modelo : SUBIBAJA Participante : ROGER CHOQUEGONZA CHAMBILLA ¿QUÉ ES UN SUBE Y BAJA? El subibaja o sube y baja es un entretenimiento infantil que consiste en una barra larga de metal o madera con asientos en sus extremos y apoyada en su punto medio. Los balancines constituyen una diversión tradicional de la infancia y se encuentran en parques y jardines junto a columpios, toboganes y otros elementos lúdicos. Su funcionamiento es el siguiente. Los niños se sientan en los sillines uno enfrente de otro y se impulsan alternativamente hasta lograr estar en lo más alto. De este modo, se produce un placentero vaivén vertical. En este sentido, es recomendable que los usuarios tengan pesos similares de modo que ambos puedan subir y bajar. En caso contrario, el balancín se vencería exclusivamente hacia un lado dejando al otro niño suspendido FUENTE: https://es.wikipedia.org/wiki/Balanc%C3%ADn_(ocio) Guía de construcción del SUBE Y BAJA Pasos Piezas a utilizar Imagen 1 1 ladrillo de 8x16, gris oscuro 4 Pendiente de 2x2 amarillo. Plancha de 2x6 agujereada 2 2 Pendiente de 1x2 rojo 1 Ladrillo de 1x2 amarillo 1 ladrillo 1x4 rojo 1 viga 1x2 1 plancha de 1x4 1 conector doble
- 2. Trabajo FINAL Curso virtual “Desarrollo de modelos robóticos 1era edición” 3 1 caja de engranajes 1 engranaje de 24 dientes 1 tornillo sinfín 1 eje de 3 pivotes 4 2 Ladrillo de 2x4 amarillo 2 Plancha de 1x4 2 conectores dobles 5 1 eje de 8 pivotes 2 levas 2 espiga de conexión con eje 1 seguro 1 engranaje de 8 dientes 6 2 ladrillo 1x2 con espiga 2 planchas 1x4 2 cabezas 1 peluca 1 gorra 2 Ladrillo de 1x2 de 1 bisagra Pendiente invertida de 1x3 7 1 eje de 6 pivotes 1 motor 1 Hub USB 1 Sensor de distancia
- 3. Trabajo FINAL Curso virtual “Desarrollo de modelos robóticos 1era edición” MODELO TERMINADO Colocar imagen del modelo robótico terminado. De ser necesario realizar precisiones sobre la ubicación del motor y la acción de los sensores. (Si lo hubiera) El juego de los niños nunca para, inclusive cuando toca la sirena siguen jugando al subi baja hasta que alguien les vaya a indicar que es hora de entrar al salón. Ello ocurre en mi colegio. Se puede programar para que al sonido de un silbato pueda parar el juego. PROGRAMACIÓN DEL MODELO ROBÓTICO El motor primero gira en sentido horario por 4 segundos, luego el motor gira en sentido antihorario por 4 segundos. Este movimiento se repite sin fin hasta que el sensor detecta la presencia de un objeto y luego para y/o finaliza el movimiento.
- 4. Trabajo FINAL Curso virtual “Desarrollo de modelos robóticos 1era edición” Propuesta de situación de aprendizaje Estrategias de Aprendizaje Materiales y recursos Tiempo ACTIVIDADES DE INICIO - Los niños y niñas observan los juegos mecánicos de la escuela. - Responden a preguntas: ¿cuál es la estructura de las máquinas? ¿Qué es una palanca? ¿cuáles son sus elementos? ¿Qué tipo de palancas hay? - El profesor les presenta una imagen. - Los niños y niñas responden a las interrogantes formuladas. - Comparan lo observado en la lámina y el sube baja - Mencionan por equipos el nombre de cada elemento de las palancas. - Identifican en su entorno escolar y familiar diferentes tipos de palancas. - Computadora portátil. - Kit de wedo - Texto de MED ciencia y ambiente. - Papelotes. 15 ACTIVIDADES DE PROCESO - Los niños leen textos del MED sobre las palancas distinguiendo que existe 3 clases de palancas: palancas de primer género ((P.PA.R), Segundo género (PA. R.P) y Tercer género (PA. P. R) - Observan el modelo y construyen el primer prototipo. - Manipulan el prototipo y responden a preguntas: ¿Qué ocurre cuando el punto de apoyo no está en el medio? Lo trasladan el punto de apoyo asimétricamente y comprenden que se necesita mayor esfuerzo para levantar la carga. - Intercambian opiniones, llegan a una conclusión y las escriben en la hoja de aplicación. Con el apoyo del profesor construyen el prototipo sube- baja. - Explican los elementos de una palanca y explican manualmente a sus compañeros. - Incorporan el motor para que funcione mecánicamente haciendo la programación LEGO 110 ACTIVIDADES DE APLICACIÓN 45
- 5. Trabajo FINAL Curso virtual “Desarrollo de modelos robóticos 1era edición” - En la actividad dibujo de las XO los niños dibujaran el prototipo creado explicando los elementos de la palanca del primer género. ACTIVIDADES DE METACOGNICIÓN Responden las siguientes preguntas: ¿Qué aprendiste hoy? ¿Qué parte del tema te fue más fácil de aprender? ¿Dónde lo puedes aplicar lo aprendido? 10 Principios tecnológicos utilizados: El subibaja, es un claro ejemplo de las palancas de primer género. La palanca de primer grado permite situar la resistencia (R) a un lado del punto de apoyo (A) y la potencia (P) al otro. Esto permite conseguir que la potencia y la resistencia tengan movimientos contrarios, por ello el desplazamiento de la potencia y resistencia dependerá de las distancias al punto de apoyo. Desde el punto de vista tecnológico, la rueda es un operador dependiente. Nunca puede usarse soIa y siempre ha de ir acompañada de, aI menos, un eje (que le sirve de guía y sustento) y de un soporte o armadura (que es el operador que controla la posición del eje y sirve de sostén a todo el conjunto). El eje utilizado permite el movimiento giratorio de la ruega (se observa en el modelo robótico) por que el eje conectado al motor permite transmitir un movimiento a los dos ejes utilizados a través de un tornillo sinfín.