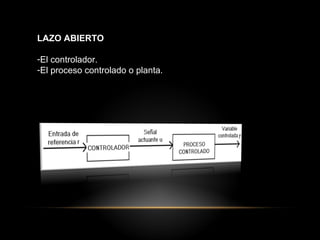
Este documento resume los conceptos fundamentales de control automático, incluyendo: 1) los componentes básicos de un sistema de control son las entradas, salidas y elementos de control; 2) la realimentación, especialmente la realimentación negativa, permite controlar un sistema mediante la comparación de la salida con la entrada; 3) los sistemas de control pueden ser de lazo abierto o de lazo cerrado, siendo este último más preciso y estable.