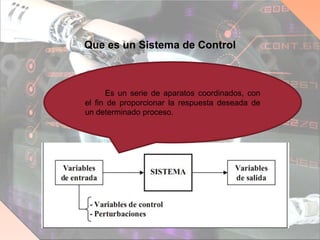
Este documento introduce conceptos básicos de control automático, incluyendo la definición de sistemas de control, sus componentes y tipos. Explica que un sistema de control es un conjunto de aparatos coordinados para proporcionar una respuesta deseada y cómo los sistemas de lazo cerrado ofrecen un control más preciso que los de lazo abierto. También resume brevemente la historia de la ingeniería de control y las ventajas e inconvenientes de los diferentes tipos de sistemas.