
Recomendados
Recomendados
Más contenido relacionado
Similar a elasticidad aplicada, arbol y textos relacionados a la ingenieria
Similar a elasticidad aplicada, arbol y textos relacionados a la ingenieria (20)
Último
Último (20)
elasticidad aplicada, arbol y textos relacionados a la ingenieria
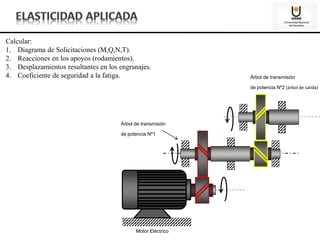
- 1. Árbol de transmisión de potencia Nº1 Motor Eléctrico Árbol de transmisión de potencia Nº2 (árbol de salida) Calcular: 1. Diagrama de Solicitaciones (M,Q,N,T). 2. Reacciones en los apoyos (rodamientos). 3. Desplazamientos resultantes en los engranajes. 4. Coeficiente de seguridad a la fatiga.
- 2. Consideraciones: Velocidad de giro constante. El momento torsor transmitido por el árbol es constante. Engranajes: Los engranajes están montados mediante chaveta rectangular (1 chaveta por engranaje). Las cargas transmitidas por los engranajes son del tipo suaves (sin sobrecargas ni arranques bajo carga) y generan esfuerzos variables en el tiempo actuantes sobre el árbol. (sa). Material de comportamiento isótropo, elástico y lineal. Considerar al elemento de máquina como un Solido Elástico. Para el análisis utilizaremos el Método de los Elementos Finitos para hallar los diagramas de solicitaciones (M,Q,N,T) desplazamientos y giros; luego utilizaremos las ecuaciones de la resistencia de materiales para hallar los esfuerzos y coeficiente de seguridad. En los datos de los engranajes figuran los diámetros primitivos de los mismos considerándose estos aproximadamente iguales al diámetro exterior lo cual no aporta un error significativo al cálculo. Dividiremos en 2 partes el análisis por MEF: a) Análisis por MEF utilizando EF unidimensional con 12 GLº por elemento. b) Análisis por MEF utilizando EF tetraédricos de orden superior.
- 3. a) Análisis por MEF utilizando EF unidimensional con 12 GLº por elemento. Engranajes (helicoidales) D2 A B C Rodamientos (apoyos) E1 E2 Árbol A B C Árbol Chaveteros a b c d D1 D3
- 4. Datos Motor Eléctrico Árbol de transmisión de potencia a analizar Material AISI 4130 Apoyos: A: absorbe carga axial - radial B: absorbe carga radial C: absorbe carga radial N [CV] = 40 E = [GPa] 210 n (motor) = [rpm] 1500 Sy = [MPa] 460 n (árbol) = [rpm] 750 Su = [MPa] 730 Datos geométrico Geométricos Arbol Engranaje Nº1 Engranaje Nº2 D1 = D3[mm] 54 Dp1 = [mm] 166,25 Dp2 = [mm] 109 D2 =[mm] 62 y1 = (áng. hélice) 30º y1 = (áng. hélice) 30º A0 = [mm2] 1662 f1 = (áng. presión diente) 20º f1 = (áng. presión diente) 20º a = [mm] 85 Ma = (Modulo aparente) 4,75 Ma = (Modulo aparente) 4,75 b = [mm] 113 Z = (Nro de dientes) 35 Z = (Nro de dientes) 23 c = [mm] 113 M = (modulo normal) 4,1 M = (modulo normal) 4,1 d = [mm] 90 n = [rpm[ 750 a) Análisis por MEF utilizando EF unidimensional con 12 GLº por elemento. A B C E1 E2 A B C a b c d D1 D3 D2
- 5. Discretización 3 4 2 D2 A B C a b c d D1 D3 1 1 2 3 4 5 XL L Nx (7) Qy (8) T (10) Qz (11) Mxz (12) Qz (5) Qy (2) Nx (1) Mxy (3) T (4) Mxz (6) Mxy (9) YL ZL EF i j Elemento Finito UNIDIMENSIONAL 12 Grados de Libertad / Nodo Nx : Fuerza normal en la dirección x. (somete a tracción - compresión al EF). Qy : Fuerza normal en la dirección y. (somete a flexión y corte al EF). Mxy: Momento en el plano x-y. (somete a flexión al EF). T : Momento en el plano y-z. (somete a torsión al EF). Qz : Fuerza normal en la dirección z. (somete a flexión y corte al EF). Mxz: Momento en el plano x-z. (somete a flexión al EF).
- 6. Descomposición de Fuerzas en los Engranajes
- 7. Descomposición de Fuerzas en los Engranajes Paso circunferencial aparente Paso normal o real y (ángulo de la hélice) Paso de la hélice
- 8. Descomposición de Fuerzas en los Engranajes
- 9. Descomposición de Fuerzas en los Engranajes
- 10. Matriz de Rigidez elemental Kii Kij Kji Kjj
- 11. Planteo a nivel global
- 12. Planteo a nivel global 3 4 2 D2 A B C a b c d D1 D3 1 1 2 3 4 5
- 13. Planteo a nivel global
- 16. Planilla Electrónica CARGAS EN LOS NODOS: NODOS AXIAL CORTE MTOS. FLECTORES TORQUE Nx [N] Qy [N] Qz [N] Mxy [N.m] Mxz [N.m] T [N.m] 1 0 0 0 0 0 0 2 2637 1920 4568 216 0 -375 3 0 0 0 0 0 0 4 -3932 -2862 6811 216 0 375 5 0 0 0 0 0 0 GRADOS DE LIBERTAD: (L) LIBRE (R) RESTRINGIDO p/Nx p/Qy p/Qz p/Mxy p/Mxz p/T NODOS (1) ó (7) (2) (8) (5) (11) (3) (9) (6) (12) (4) (10) 1 R R R L L L 2 L L L L L L 3 R R R L L L 4 L L L L L R 5 L R R L L L
- 17. RESULTADOS CARGAS Y DESPLAZAMIENTOS NODALES : Nodo Dirección Condición Vínculos VECTOR DE CARGAS NODALES VECTOR DESPLAZAMIENTOS (1) R P11 = Nx(n1) -1.324 [N] d11 = dx(n1) 0,000000 [mm] (2) R P12 = Qy(n1) -108 [N] d12 = dy(n1) 0,000000 [mm] N 1 (3) L P13 = Mxy(n1) -0 [N.m] d13 = jxy(n1) 0,000036 [rad] (4) L P14 = T(n1) 0 [N.m] d14 = q (n1) (0,000721) [rad] (5) R P15 = Qz(n1) -1.452 [N] d15 = dz(n1) 0,000000 [mm] (6) L P16 = Mxz(n1) 0 [N.m] d16 = jxz(n1) (0,000044) [rad] (1) L P21 = Nx(n2) 2.637 [N] d21 = dx(n2) 0,000234 [mm] (2) L P22 = Qy(n2) 1.920 [N] d22 = dy(n2) 0,002966 [mm] N 2 (3) L P23 = Mxy(n2) 216 [N.m] d23 = jxy(n2) 0,000032 [rad] (4) L P24 = T(n2) -375 [N.m] d24 = q (n2) (0,000721) [rad] (5) L P25 = Qz(n2) 4.568 [N] d25 = dz(n2) 0,002043 [mm] (6) L P26 = Mxz(n2) -0 [N.m] d26 = jxz(n2) 0,000016 [rad] (1) R P31 = Nx(n3) 2.619 [N] d31 = dx(n3) 0,000000 [mm] (2) R P32 = Qy(n3) 621 [N] d32 = dy(n3) 0,000000 [mm] N 3 (3) L P33 = Mxy(n3) -0 [N.m] d33 = jxy(n3) (0,000059) [rad] (4) L P34 = T(n3) 0 [N.m] d34 = q (n3) (0,000361) [rad] (5) R P35 = Qz(n3) -7.263 [N] d35 = dz(n3) 0,000000 [mm] (6) L P36 = Mxz(n3) -0 [N.m] d36 = jxz(n3) (0,000023) [rad] (1) L P41 = Nx(n4) -3.932 [N] d41 = dx(n4) (0,000701) [mm] (2) L P42 = Qy(n4) -2.862 [N] d42 = dy(n4) (0,003690) [mm] N 4 (3) L P43 = Mxy(n4) 216 [N.m] d43 = jxy(n4) 0,000028 [rad] (4) R P44 = T(n4) 375 [N.m] d44 = q (n4) 0,000000 [rad] (5) L P45 = Qz(n4) 6.811 [N] d45 = dz(n4) 0,005666 [mm] (6) L P46 = Mxz(n4) -0 [N.m] d46 = jxz(n4) (0,000019) [rad] (1) L P51 = Nx(n5) 0 [N] d51 = dx(n5) (0,000701) [mm] (2) R P52 = Qy(n5) 429 [N] d52 = dy(n5) 0,000000 [mm] N 5 (3) L P53 = Mxy(n5) -0 [N.m] d53 = jxy(n5) 0,000048 [rad] (4) L P54 = T(n5) 0 [N.m] d54 = q (n5) 0,000000 [rad] (5) R P55 = Qz(n5) -2.665 [N] d55 = dz(n5) 0,000000 [mm] (6) L P56 = Mxz(n5) 0 [N.m] d56 = jxz(n5) 0,000104 [rad] SOLICITACIONES: Solicita- Nodo 1 Nodo 2 Nodo 3 Nodo 4 Nodo 5 ciones Der. Izq. Der. Izq. Der. Izq. Der. Izq. Nx -1.324 -1.324 1.313 1.313 3.932 3.932 0 0 Qy -108 -108 1.812 1.812 2.433 2.433 -429 -429 Qz -1.452 -1.452 3.116 3.116 -4.146 -4.146 2.665 2.665 Qz res 1.456 1.456 3.605 3.605 4.808 4.808 2.699 2.699 Mxy 0 9 225 20 20 -255 -39 -0 Mxz 0 -123 -123 229 229 -240 -240 0 M res 0 124 257 230 230 350 243 0 T 0 0 -375 -375 -375 -375 0 0
- 19. Planteo de Esfuerzos en el NODO 4 (Engranaje Nº2) y x z Mres T Qres N sN sM T Q A B z y x sM T z y x Q; T sN Qres = 4808 [N] Mres = 350 [Nm] T = 375 [Nm] N = 3932 [N]
- 20. Planteo de Esfuerzos en el NODO 4 (Engranaje Nº2)
- 21. Concentración de Esfuerzos Chavetero Kt (teórico) Q (sensibilidad) Ke (efectivo a la fatiga) Esf. normal por Flexión - - 1,7 Adoptado de ábaco de la asignatura Esf. tangencial por Torsión 1,6 Cambio de sección Kt (teórico) Q (sensibilidad) Ke (efectivo a la fatiga) Esf. normal por Flexión 1,4 0,9 1,36 Kt adoptados de pagina 1007 "Diseño de Máquinas" (Robert L. Norton) 1ra Edición 1999 Esf. tangencial por Torsión 1,2 0,9 1,18 r = 1[mm] chavetero
- 22. Esfuerzos Equivalente Medios y Alternos
- 23. Estimamos El Limite de Fatiga
- 24. Adopto un Criterio de Falla a la Fatiga