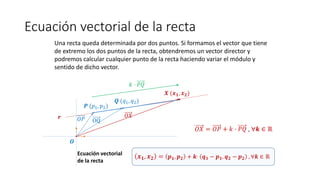
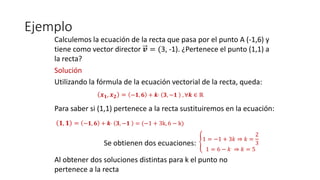
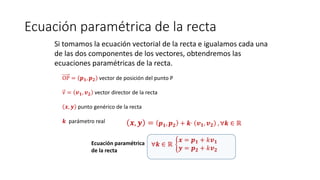
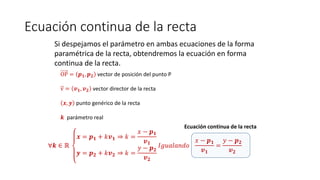
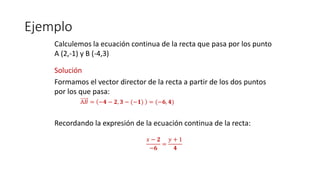
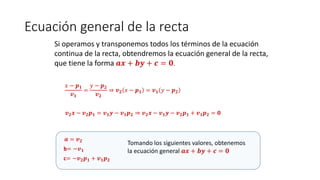
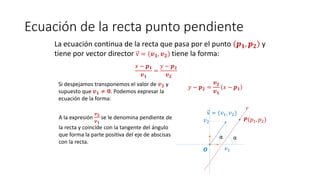
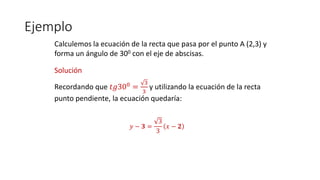
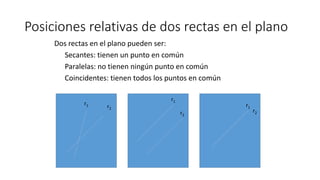
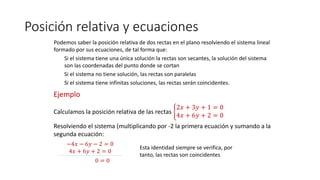
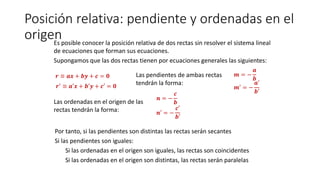
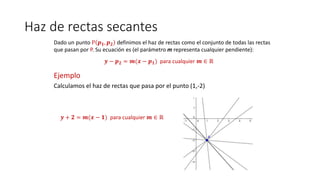
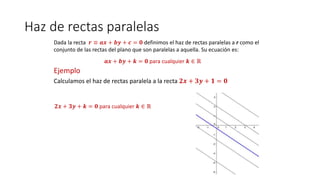
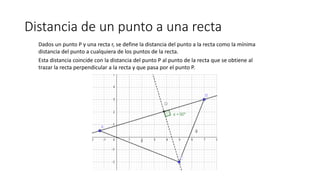
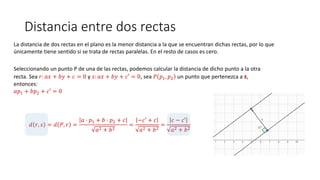
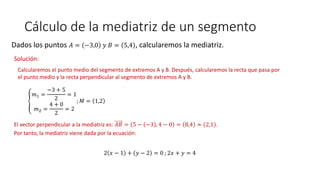
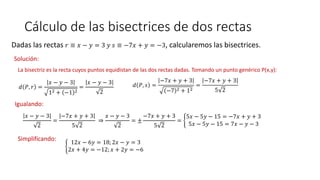
El documento describe diferentes formas de representar una recta en el plano, incluyendo la ecuación vectorial, paramétrica, continua y general. También explica cómo determinar la posición relativa de dos rectas y calcular distancias entre puntos y un punto a una recta.