
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (14)
Similar a Modelo del cuarto de carro
Similar a Modelo del cuarto de carro (20)
Último
Último (20)
Modelo del cuarto de carro
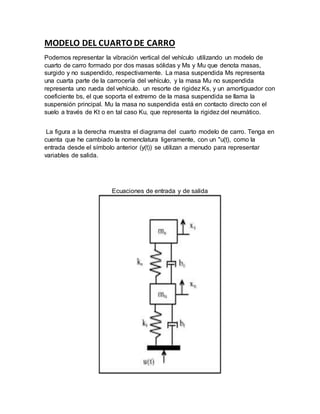
- 1. MODELO DEL CUARTO DE CARRO Podemos representar la vibración vertical del vehículo utilizando un modelo de cuarto de carro formado por dos masas sólidas y Ms y Mu que denota masas, surgido y no suspendido, respectivamente. La masa suspendida Ms representa una cuarta parte de la carrocería del vehículo, y la masa Mu no suspendida representa uno rueda del vehículo. un resorte de rigidez Ks, y un amortiguador con coeficiente bs, el que soporta el extremo de la masa suspendida se llama la suspensión principal. Mu la masa no suspendida está en contacto directo con el suelo a través de Kt o en tal caso Ku, que representa la rigidez del neumático. La figura a la derecha muestra el diagrama del cuarto modelo de carro. Tenga en cuenta que he cambiado la nomenclatura ligeramente, con un "u(t), como la entrada desde el símbolo anterior (y(t)) se utilizan a menudo para representar variables de salida. Ecuaciones de entrada y de salida
- 2. La energía cinética, la energía potencial, y la función de disipación del sistema son las siguientes y según el método de Lagrange: Las ecuaciones de movimiento, que se puede expresar en forma de matriz
- 3. Ecuaciones de Movimiento: A través del proceso de diagrama de un cuerpo libre y aplicar la segunda Ley de Newton llegamos a las ecuaciones diferenciales. La posición de referencia para los desplazamientos son el punto de equilibrio estático, de modo que podemos dejar caer el peso de las ecuaciones, dejando las ecuaciones en esta forma: Ecuaciones de Entrada/Salida: Es importante tener en cuenta que antes de que podamos proceder a poner estas ecuaciones en la forma de un modelo de entrada/salida, que necesitamos para identificar el producto. En esta situación, hay dos variables físicas que son las opciones obvias, Xs y Xu . Que se obtendrán dos diferentes modelos de entrada/salida, uno para cada salida. Tenga en cuenta que otros modelos son posibles. Para combinar estas dos ecuaciones de movimiento para una sola entrada/salida modelo, tenemos que manipular las ecuaciones para eliminar los no deseados. Vamos a usar el "D - operador" se utiliza para representar diferenciación con respecto al tiempo. Poner ambas ecuaciones en "D - operador " nos da El primer modelo que te es el modelo de la masa suspendida. Se hace esto para eliminar la variable (Xu ). Por lo tanto, resolver la ecuación en Xu , tal como se muestra:
- 4. Sustituir esta ecuación en la parte superior: Ahora se trata de álgebra para deshacerse de los denominadores. Entonces multiplicamos ambos lados de la ecuación con el denominador. El siguiente paso es similar al siguiente: Multiplicar los polinomios y simplificar Agrupamos todas las Xs términos en el lado izquierdo:
- 5. Ahora sólo tenemos que vuelva del "D - operador" formato derivado de formato tradicional. Con la forma del modelo de entrada/salida en el texto: Donde: La entrada (u(t)) con el movimiento de las masas no suspendidas,la forma del modelo será similar, con un cambio significativo en el lado de la entrada (una tercera derivada de la entrada): Pero los coeficientes serán diferentes:
- 6. Tenga en cuenta que los coeficientes de la variable de salida son los mismos en ambos casos (son idénticos). No es coincidencia . Estos coeficientes de polinomio característico del sistema y será el mismo para cualquier variable de salida. En las ecuaciones de Estado: El modelo de entrada/salida se derivan de la masa suspendida desplazamiento (Xs ) y el perfil de entrada (u). Recordar que la forma del modelo es la siguiente: Los diferentes coeficientes definidos anteriormente. Se escribe la ecuación auxiliar en la variable x. Esta nueva ecuación se obtiene sustituyendo nuestra nueva variable para la variable de salida (Xs en este caso) y equiparar a la variable de entrada (sin derivados). Un conjunto apropiado de variables de estado se puede encontrar en la siguiente forma
- 7. El estado las ecuaciones se obtiene fácilmente de la siguiente manera: Todo funciona cuando podemos derivar ecuaciones la salida. El método se puede demostrar si nos fijamos en el original de entrada/salida y la ecuación auxiliar en "D“. Cuando se sustituye la segunda ecuación en la primera, eliminando u, obtenemos: Esto se convierte en una salida válida a la ecuación para el modelo del espacio del estado cuando nos damos cuenta de que la variable auxiliar , x, y su primera tres derivados son las variables de estado: Por último, completa esta parte por el estado y las ecuaciones de salida en forma de matriz y en la vuelta a sustituir los parámetros físicos de los coeficientes genéricos.