Descargado 199 veces
![LaFunc n d Tra fe nc
ió e ns re ia
L [ c(t )] c(t ) = salida
Función de transferencia =
L [ r (t )] r (t ) = entrada
con condiciones iniciales cero
La Función de Transferencia:
La función de transferencia de un sistema se define como la transformada
de Laplace de la variable de salida y la transformada de Laplace de la variable de
entrada, suponiendo condiciones iníciales cero.
•Solo es aplicable a sistemas descritos por ecuaciones diferenciales lineales
invariantes en el tiempo.
•Es una descripción entrada salida del comportamiento del sistema.
•Depende de las características del sistema y no de la magnitud y tipo de entrada
•No proporciona información acerca de la estructura interna del sistema](https://image.slidesharecdn.com/presentacinfuncindetransferencia-090718172106-phpapp01/85/Presentacion-Funcion-De-Transferencia-2-320.jpg)
![LaFunc n d Tra fe nc
ió e ns re ia
La función de transferencia F[z] correspondiente a un sistema lineal e
invariante es la relación constante que existe entre las transformada Z de la salida y
de la entrada, para condiciones iníciales nulas.
Sistema lineal: Es aplicable el principio de superposición, de manera que la suma de
entradas produce la suma de salidas, y una entrada multiplicada por una constante
produce la misma salid multiplicada por la misma constante .
Sistema invariante en el Tiempo: Una entrada desplazada en el tiempo produce la
misma salida desplazada en el tiempo. En un sistema lineal, pero variable en el tiempo
los coeficientes dependes del tiempo K.
Algoritmo Lineal, en forma de ecuación diferencia
Usando la transformación Z, y específicamente sus propiedades de linealidad y
retardo, para señales casuales (condiciones iníciales nulas):](https://image.slidesharecdn.com/presentacinfuncindetransferencia-090718172106-phpapp01/85/Presentacion-Funcion-De-Transferencia-3-320.jpg)
![LaFunc n d Tra fe nc
ió e ns re ia
Sistema Casual: Es ejecutable en tiempo real, por lo que y[K] no depende de valores
futuro de la entrada µ[k+1].µ[k+2]…. Se admite el valor presente de la entrada µ[k],
suponiendo que el tiempo de calculo sea despreciable. Por tanto la función de
transferencia será una fracción propia (orden del numerador menor o igual que el del
denominador).
Sistema No Lineal: Un sistema es a-lineal, si no le puede aplicar el principio de
superposición. por tanto, para un sistema a-lineal la respuesta a dos entradas no
puede calcularse tratando cada una a la vez y sumando los resultados.
Los procedimientos para encontrar soluciones a problemas que involucran
sistemas a-lineales son complicados. Por ese motivo resulta necesario considera
sistema lineales “equivalente”. Tale sistema lineales ”equivalentes” son válidos sòlo
para un rango limitado de trabajo.](https://image.slidesharecdn.com/presentacinfuncindetransferencia-090718172106-phpapp01/85/Presentacion-Funcion-De-Transferencia-4-320.jpg)
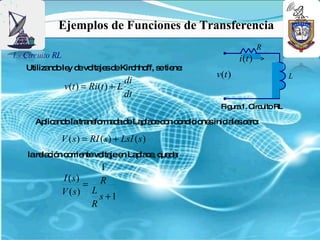
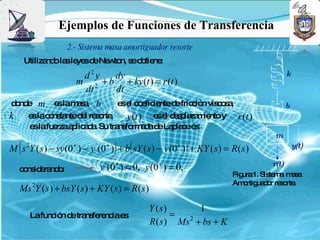
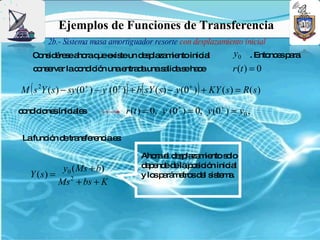
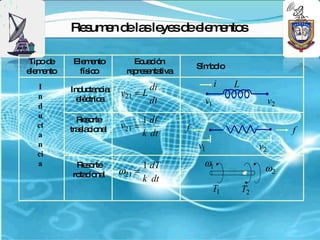
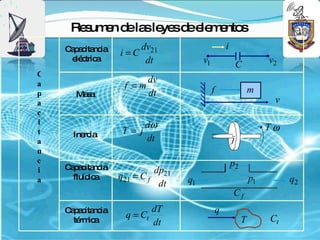
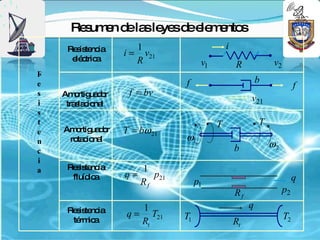


1) La función de transferencia describe el comportamiento de entrada-salida de un sistema mediante la relación entre las transformadas de Laplace de la salida y la entrada, suponiendo condiciones iniciales nulas. 2) Se presentan ejemplos de funciones de transferencia para circuitos RL, sistemas masa-amortiguador-resorte y diferentes elementos. 3) Existen diferentes clasificaciones de funciones de transferencia como respuesta al impulso, características espectrales y de fase.





































































