Descargado 913 veces



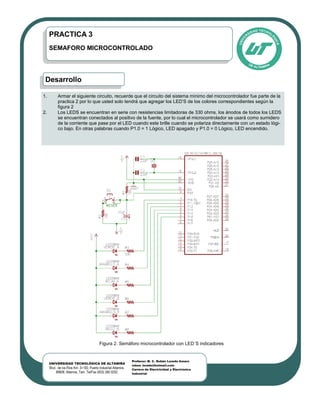
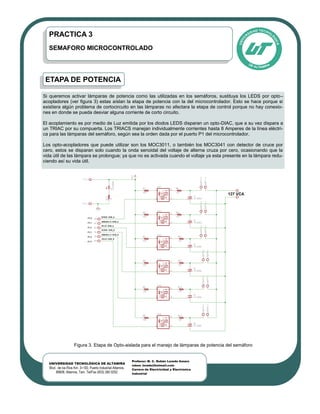




Este documento describe el desarrollo de un semáforo microcontrolado para controlar el tráfico en una intersección de dos calles de un solo sentido. Explica cómo utilizar los puertos de salida de un microcontrolador para controlar los tiempos de encendido y apagado de semáforos LED indicadores verdes, amarillos y rojos. También incluye una tabla con la secuencia lógica de los estados de los semáforos y subrutinas para hacer parpadear el LED verde.



































































































