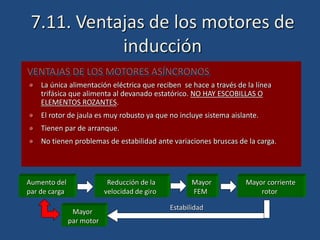
El documento describe las ventajas y desventajas de los motores de inducción. Sus principales ventajas son que no tienen escobillas ni elementos rozantes, tienen par de arranque y no tienen problemas de estabilidad ante variaciones de carga. Sus principales inconvenientes son que requieren procedimientos para limitar su alta corriente de arranque y necesitan un convertidor electrónico para variar su velocidad. Adicionalmente, explica conceptos como el deslizamiento y cómo se modela el circuito equivalente de una máquina asíncrona.