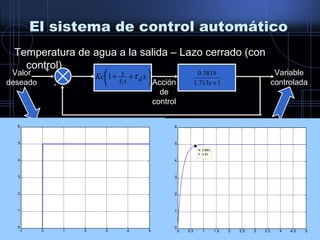
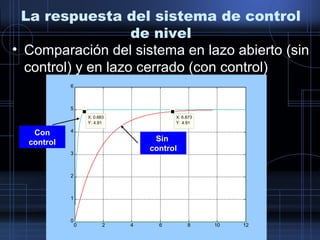
Descargado 54 veces

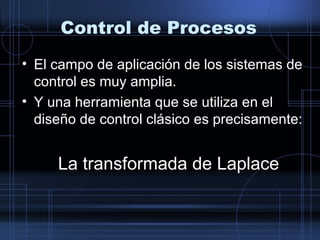
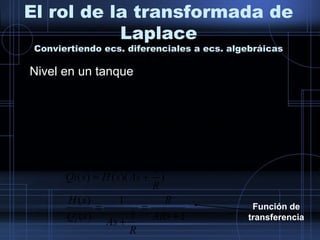
![El rol de la transformada de
Laplace
Conviertiendo ecs. diferenciales a ecs. algebráicas
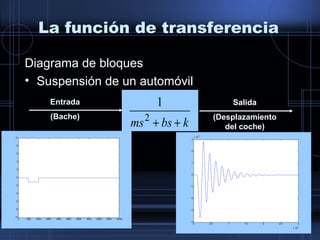
Suspensión de un automóvil
[ ]
kbsmssF
sZ
kbsmssZsF
sZmssbsZskZsF
dt
tzd
m
dt
tdz
btkztf
++
=
++=
=−−
=−−
2
2
2
2
2
1
)(
)(
)()(
)()()()(
cero)aigualinicialesscondicionendo(considera
términocadaaLaplacedeadatransformlaAplicando
)()(
)()(
Función de
transferencia](https://image.slidesharecdn.com/claseaplicacionesrealesdelatransformadadelaplace-150903215436-lva1-app6891/85/Aplicaciones-reales-de-la-Transformada-de-Laplace-15-320.jpg)
![[ ] [ ] [ ]
[ ]
1
1
)(
)(
1)()(E
)(
1
)()()(E
I(s))parao(despejandecuacioneslasCombinando
)()(
1
)(
1
)()()(E
LaplacedeadatransformlaAplicando
)()(
1
)(
1
)(
)(
)(
2
2
i
i
i
++
=
++=
++=
=++=
=++= ∫∫
RCsLCssE
sE
RCsLCssEs
sCsE
Cs
sCsERsCsELss
sEsI
Cs
sI
Cs
sRIsLsIs
tedtti
C
dtti
C
tRi
dt
tdi
Lte
i
o
o
ooo
o
oi
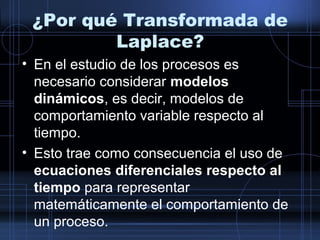
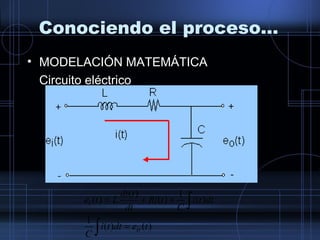
El rol de la transformada de
Laplace
Conviertiendo ecs. diferenciales a ecs. algebráicas
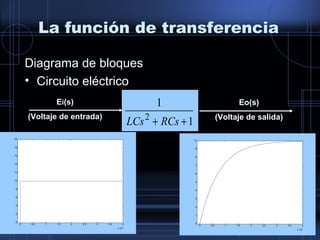
Circuito eléctrico
Función de
transferencia](https://image.slidesharecdn.com/claseaplicacionesrealesdelatransformadadelaplace-150903215436-lva1-app6891/85/Aplicaciones-reales-de-la-Transformada-de-Laplace-19-320.jpg)
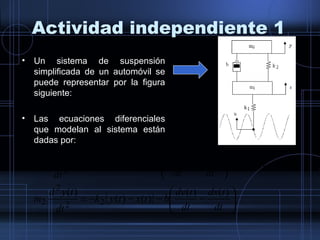
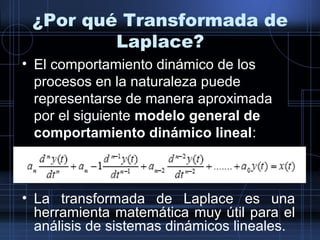
![Actividad independiente 2
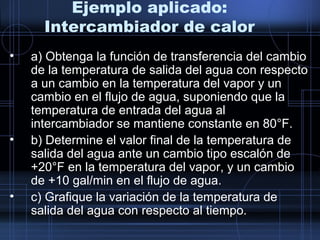
a) Obtén la función de transferencia
(Tip: transforma ambas ecuaciones, despeja X(s) en
ambas e iguálalas, finalmente reacomoda para dejar
Y(s)/U(s) )
b) Se sabe que b=1300 Ns/cm, k1=2000 KN/cm,
k2=50KN/cm, m2=1850 kg y m1 = 20 kg.
Si se le aplica una cambio escalón unitario en la
entrada de fuerza, obtén la expresión en el tiempo, es
decir, la transformada inversa de dicha función.
c) Utilizando cualquier paquete de graficado, excel,
matlab, mathematica, etc. Grafica la respuesta del
desplazamiento en el tiempo para t = [0,20]
)(
)(
sU
sY](https://image.slidesharecdn.com/claseaplicacionesrealesdelatransformadadelaplace-150903215436-lva1-app6891/85/Aplicaciones-reales-de-la-Transformada-de-Laplace-43-320.jpg)

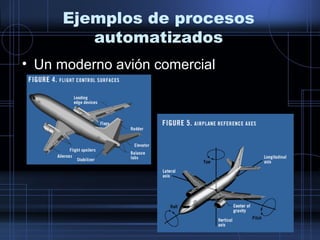
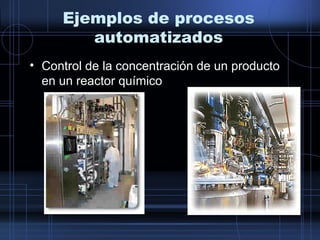
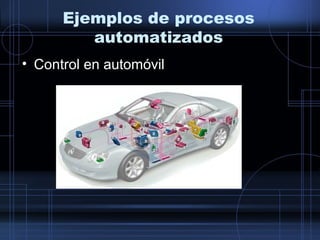
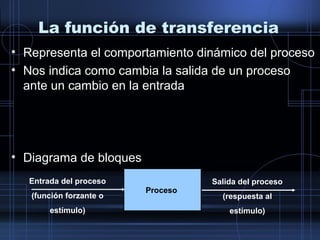
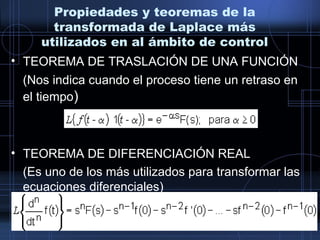
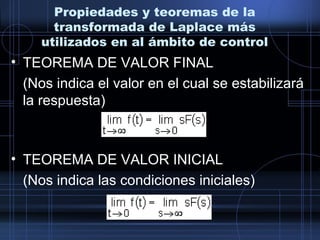
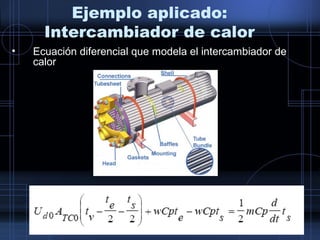
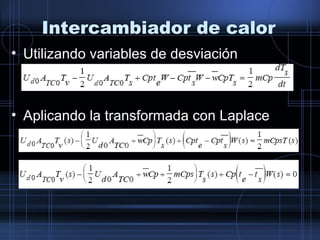
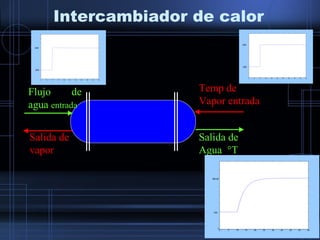
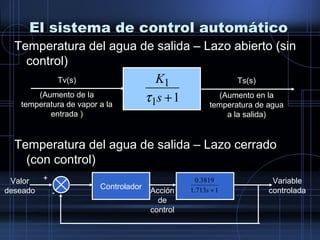
El documento describe los sistemas de control de procesos, incluyendo ejemplos como aviones, satélites y reactores químicos. Explica que la transformada de Laplace es una herramienta útil para el análisis de sistemas dinámicos lineales al convertir ecuaciones diferenciales en algebraicas. También cubre conceptos como la función de transferencia y su uso para representar el comportamiento dinámico de un proceso.