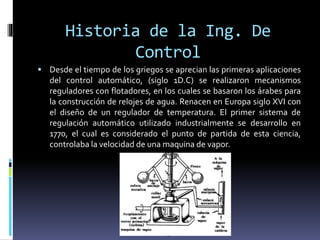
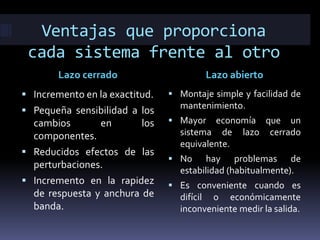
Este documento presenta una introducción al control automático y la ingeniería de control. Explica que el control automático es fundamental en procesos como el control de presión y temperatura. Luego resume brevemente la historia de la ingeniería de control y sus avances clave. Finalmente, describe los componentes básicos de un sistema de control, los tipos principales de sistemas de control (lazo abierto vs lazo cerrado), y algunas clasificaciones de sistemas como lineales vs no lineales.