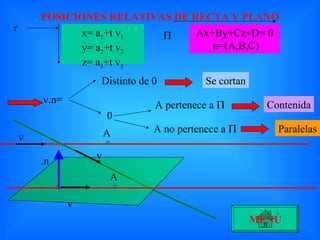
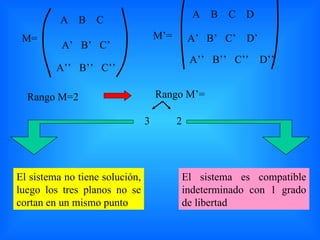
El documento resume conceptos geométricos fundamentales como el punto medio de dos puntos, la simetría de un punto respecto a otro, ecuaciones de rectas y planos, y posiciones relativas de rectas, planos y un plano y una recta. Explica cómo determinar estas propiedades y relaciones mediante el uso de ecuaciones vectoriales, paramétricas y normales.