Este documento presenta conceptos básicos sobre coordenadas en el espacio tridimensional. Introduce los sistemas de referencia y coordenadas de puntos. Explica cómo obtener las coordenadas de vectores y segmentos mediante operaciones con vectores. Finalmente, describe elementos geométricos como rectas, planos y sus ecuaciones en diferentes formas, incluyendo paramétricas, vectoriales e implícitas.
![Coordenadas en el espacio
• Un punto O y una base B = {
→
i ,
→
j ,
→
k } de los vectores libres del
espacio constituyen un sistema de referencia en el espacio.
Se escribe S = {O;
→
i ,
→
j ,
→
k }.
• En lo que sigue, por comodidad, trabajaremos en la base ortonormal.
[
→
OP] = x .
→
i + y .
→
j + z .
→
k
(x, y, z) son las coordenadas de P respecto
del sistema de referencia S.
Vector de posición de P
Origen de coordenadas
P’](https://image.slidesharecdn.com/espacioafinrectasplanos-170312222434/85/Espacio-afin-rectas-planos-3-320.jpg)
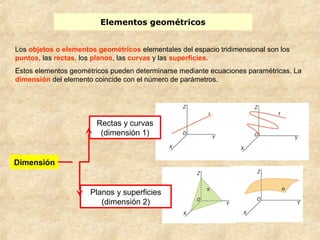
![Ejes coordenados. Planos coordenados
• Los tres vectores de la base B
determinan con el origen O
tres ejes de coordenadas
OX, OY, y OZ.
• Los planos OXY, OYZ y OZX
se denominan planos
coordenados del sistema de
referencia.
[
→
OP] = x .
→
i + y .
→
j + z .
→
k](https://image.slidesharecdn.com/espacioafinrectasplanos-170312222434/85/Espacio-afin-rectas-planos-4-320.jpg)
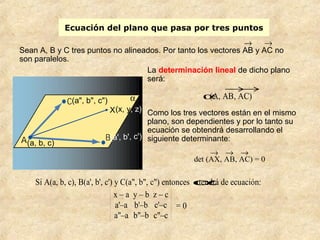
![Coordenadas de un vector libre cualquiera
•
→
PQ =
→
OQ –
→
OP
• [
→
PQ] =
→
OQ –
→
OP =
= (b – a, b' – a' , b" – a")
• Los puntos P y Q determinan el
vector fijo
→
PQ
•
→
OP +
→
PQ =
→
OQ
Las coordenadas de un vector libre
→
u = [
→
PQ] respecto de la base B =
{
→
i ,
→
j ,
→
k } se obtienen restando las coordenadas del punto P de las
correspondientes de Q en el sistema de referencia S = {O;
→
i ,
→
j ,
→
k }.](https://image.slidesharecdn.com/espacioafinrectasplanos-170312222434/85/Espacio-afin-rectas-planos-5-320.jpg)

![Rectas en el espacio: ecuación vectorial
• Una recta viene determinada por un punto
y una dirección. La dirección está
marcada por un vector libre
→
u llamado
vector director.
• Un punto X está en la recta si y sólo si
→
PX
y
→
u son proporcionales: [
→
PX] = t ·
→
u
• Si
→
p es el vector de posición de P,
→
x es
el vector de posición de X, quedará:
→
x –
→
p = t ·
→
u es decir:
→
x =
→
p + t ·
→
u
La expresión
→
x =
→
p + t ·
→
u con t ∈ R es la ecuación vectorial de la recta que
pasa por P y tal que
→
u es un vector director de la misma.
p
x](https://image.slidesharecdn.com/espacioafinrectasplanos-170312222434/85/Espacio-afin-rectas-planos-8-320.jpg)







![Vector normal a un plano
Observamos que:
→
AB = (x2 – x1, y2 – y1, z2 – z1)
Como A (x1,y1,z1)∈ π y B (x2,y2,z2)∈ π
tenemos que:
ax1 + by1 + cz1 + d = 0
ax2 + by2 + cz2 + d = 0
Restando término a término obtenemos:
a(x2 – x1) + b(y2 – y1) + c(z2 – z1) = 0
(a, b, c) .
(x2 – x1, y2 – y1, z2 – z1) = 0
→
n . [
→
AB] = 0
El vector
→
n es perpendicular a cualquier vector contenido en el plano, es
decir está en una dirección perpendicular al plano. Recibe el nombre de
vector normal al plano. Sus coordenadas son (a,b,c)](https://image.slidesharecdn.com/espacioafinrectasplanos-170312222434/85/Espacio-afin-rectas-planos-16-320.jpg)





























![4 1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/4-11-150415213406-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
























































































