Descargar como PDF, PPTX











![• Sistema Discreto Dinámico Causal:
El elemento de salida puede estar influenciada por las salidas
anteriores y por las entradas hasta el instante de muestreo
en que se produce la salida.
µ ( k ) , µ ( k − 1) , µ ( k − 2 ) ,
Y(k) = f
µ (k ) Sistema Discreto ...Y ( k ) , Y ( k − 1) , Y ( k − 2)
Dinámico Casual
• Sistema no causal:
Este sistema puede generar elementos de índice superior al
elemento de entrada, realizar una función a través de un
algoritmo considerando los elementos generados y entregar
una secuencia de salida
µ (k ) Sistema Discreto
Y ( k ) = 1 3[ µ ( k − 1) + µ ( k ) + µ ( k + 1) ]
Dinámico no casual](https://image.slidesharecdn.com/introparte2-110610075844-phpapp02/85/Intro-parte2-13-320.jpg)

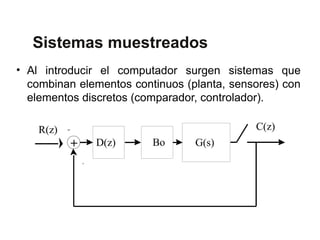
El documento describe los sistemas de muestreo y conversión analógico-digital. Introduce los conceptos de señales continuas vs discretas, y explica cómo los conversores AD/DA transforman entre dominios mediante muestreo y retención. También define tipos de muestreo y clasifica los sistemas en análogos, de tiempo discreto, de datos muestreados y digitales.


































































