Descargar como PDF, PPTX






![ARRAY
Es una colección de variables indexadas por un número
Para definir un array
- tipo nombre[#]={v1, v2,...}
byte columna[2]={B1000000, B0100000};
Para definir uno de sus elementos
columna[0]=B1000000;](https://image.slidesharecdn.com/abs-a11-controlmatrizledsinlibreria-151027183003-lva1-app6892/85/P11-Kiwibot-Basic-Shield-Control-matriz-led-sin-libreria-14-320.jpg)
![ARRAYS MATRIZ
Para indicar un 1 en las columnas y un 0 en las filas
enviando el bit menos significativo primero:
byte columna[7]={B00000010, B00000100, B00001000,
B00010000, B00100000, B01000000,B10000000};
byte fila[5]= {B11110111, B11101111, B11011111,
B10111111,B01111111};](https://image.slidesharecdn.com/abs-a11-controlmatrizledsinlibreria-151027183003-lva1-app6892/85/P11-Kiwibot-Basic-Shield-Control-matriz-led-sin-libreria-15-320.jpg)




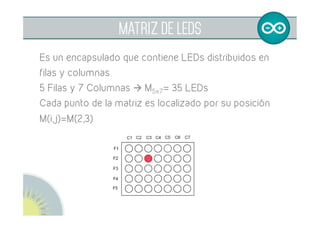
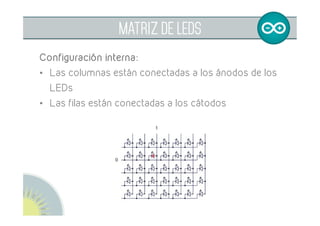
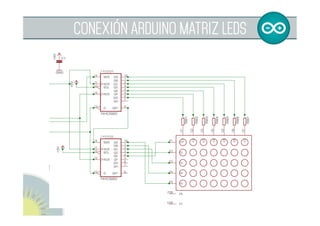
El documento detalla cómo controlar una matriz de LEDs utilizando Arduino sin librerías, empleando registros de desplazamiento para optimizar el uso de pines digitales. Se explican conceptos fundamentales como la configuración interna de la matriz, el uso de la función shiftout y la codificación de bytes. Además, se presentan ejemplos prácticos para encender puntos específicos en la matriz.
































































































