
Recomendados
Más contenido relacionado
Similar a Teorema de valor inicial y final.pptx
Similar a Teorema de valor inicial y final.pptx (20)
Más de nestor773383
Último
Último (20)
Teorema de valor inicial y final.pptx
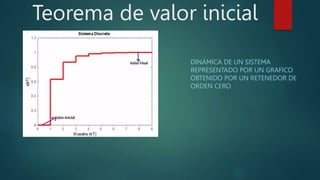
- 1. Teorema de valor inicial DINÁMICA DE UN SISTEMA REPRESENTADO POR UN GRAFICO OBTENIDO POR UN RETENEDOR DE ORDEN CERO
- 2. Queremos conocer cual es la condición inicial en que arranca nuestro sistema Establecemos que la señal discreta x=Kt va a ser igual a cero para toda muestra negativa. Teorema de valor inicial
- 3. Si aplicamos la definición teórica de la transformada Z. Como solo nos interesa conocer la condición inicial del sistema, debemos implantar una condición para eliminar el resto de elementos Teorema de valor inicial
- 4. Para lograr esto y analizando que el resto de coeficientes involucran la variable z, debemos colocar la igualdad de z a infinito. Comprobación Teorema de valor inicial
- 5. Teorema de valor inicial
- 6. En una empresa se tiene modelado un proceso mediante la siguiente función de trasferencia discreta Y que levamos aplicar a este proceso una perturbación del tipo escalón unitario. Teorema de valor inicial
- 7. Si realizamos el producto de las dos ecuaciones anteriores podemos conocer la función de salida. Entonces, aplicamos el teorema del valor inicial. Teorema de valor inicial
- 8. Obtenemos la grafica de este sistema y podemos corroborar que el inicio es en 0.3
- 9. Teorema valor final Tenemos los estados estacionarios de inicio y final. Estos teoremas se aplican a sistemas estables afectados por una señal de perturbación limitada, como es el caso de la señal tipo escalón. La señal rampa no es una señal limitada y por lo tanto inestable.
- 10. Teorema del valor final Debemos suponer que todas las muestras previas al 0 , deben ser nulos es decir igual a 0 Y que dará un muestreo infinito hasta que se logre la estabilidad de la señal.
- 11. Teorema del valor final Para el caso continuo en el estado estacionario, llega un momento e que las derivadas no existen, es decir adoptan el valor de 0 Por lo que al trasladarlo al dominio de La Place y al no ocurrir cambios S es igual a 0. Si hacemos la relación del sistema continuo con el sistema discreto obtenemos en que Z será igual a 1
- 12. Teorema del valor final
- 13. Teorema del valor final Aplicamos la definición teórica de la transformada Z Como ya establecimos que Z=1, será muy fácil eliminar algunos de los componentes.
- 14. Teorema del valor final Para eliminar el resto de los coeficientes. Realizaremos la resta de la señal x(kT) menos la misma señal solo que atrasada una muestra.