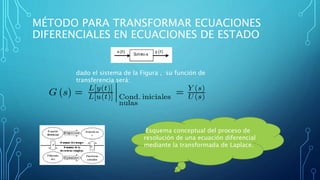
El documento describe las variables de estado de un sistema dinámico. Las variables de estado son las variables mínimas necesarias para describir completamente el estado del sistema. Se pueden usar modelos matemáticos para construir ecuaciones de estado que relacionan las variables de estado, las entradas y las salidas de un sistema. Las ecuaciones de estado pueden representarse en forma matricial para sistemas lineales.






![SOLUCIÓN DE ECUACIONES DE ESTADO
C(Z)
R(Z)
BnZn + bn-1Zn-1 + ... + B1Z + bo
Zn + an – 1Zn-1 + … + a1 Z + ao
A PARTIR DE LA FUNCION DE TRANSFERENCIA EN T.D.
DONDE ai bi PUEDEN SER NULOS.
Para el caso continuo que un sistema lineal variante en el tiempo puede ser descrito a través de las siguientes ecuaciones de estado:
[Ec. 1.a]
[Ec. 1.b]
De manera similar, en el caso discreto la tarea principal es resolver la ecuación de estado:
[Ec. 2]
en donde se conocen el estado inicial x(k0) y la entrada en función de k: u(k) para k ≥ k0.](https://image.slidesharecdn.com/variablesestadon-180118130431/85/Variables-estadon-8-320.jpg)






















































