1. 1 Actividades UD 7. Sistemas de control automático Tecnología Industrial II
Sistemas de control: actividades de sistemas de lazo abierto y cerrado
Los sistemas de control (también llamados
automatismos) son sistemas capaces de
captar información de su entorno (luz,
temperatura, contacto, presencia, humedad,
presión, velocidad, etc.), y en función de los
datos que recibe, realizar alguna acción.
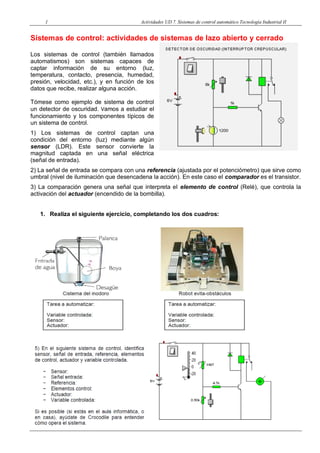
Tómese como ejemplo de sistema de control
un detector de oscuridad. Vamos a estudiar el
funcionamiento y los componentes típicos de
un sistema de control.
1) Los sistemas de control captan una
condición del entorno (luz) mediante algún
sensor (LDR). Este sensor convierte la
magnitud captada en una señal eléctrica
(señal de entrada).
2) La señal de entrada se compara con una referencia (ajustada por el potenciómetro) que sirve como
umbral (nivel de iluminación que desencadena la acción). En este caso el comparador es el transistor.
3) La comparación genera una señal que interpreta el elemento de control (Relé), que controla la
activación del actuador (encendido de la bombilla).
1. Realiza el siguiente ejercicio, completando los dos cuadros:
2. 2 Actividades UD 7. Sistemas de control automático Tecnología Industrial II
3. 3 Actividades UD 7. Sistemas de control automático Tecnología Industrial II
Sistemas de control: actividades de simplificación de bloques y del estudio
de estabilidad de sistemas
1. Calcular los parámetros de C y K para que el sistema sea estable
s2
+ 3s + C
G(s) = -----------------------
s3
+ 5s2
+ Ks + 3
2. Determinar al función de transferencia total del siguiente diagrama de bloques
R(s) + +
+ C(S)
_
3. Estudiar la estabilidad del sistema en lazo abierto (como si no existiese realimentación) y
también en lazo cerrado.
R(s) + + C (s)
- -
4. Determinar si la función de transferencia representa un sistema estable o inestable. Si es
inestable, hallar el número de raíces en la región real positiva del plano s. ( El nº de raíces
coincide con el nº de cambios de signo que se producen en la primera columna del criterio de
Routh)
s - 3
G(s) = ----------------------
s3
– 5s + 1
5. Dado el polinomio P(s) = 6s5
+ 2s4
+ 5s3
+ s2
+ 3s + 5, determina la estabilidad del sistema que
representa.
G1 G2
G3
H1
50
2
s + 3
1
s(s+2)
4. 4 Actividades UD 7. Sistemas de control automático Tecnología Industrial II
6. Dado el diagrama de bloques del sistema de control que se indica en la figura, determinar el
rango de valores de K para que el sistema sea estable.
7. Reducir el diagrama de bloques que aparece en la figura, obteniendo la función de transferencia
C(s)/R(s).
8. Simplifica el siguiente sistema de control hasta su forma canónica y determina su función de
transferencia:
9. Obtén la forma canónica y la función de transferencia del sistema cuyo diagrama de bloques es:
5. 5 Actividades UD 7. Sistemas de control automático Tecnología Industrial II
10. Calcular los posibles valores de K para que el sistema sea estable
s2
+ 3s -2
G(s) = ----------------------------------
s4
+ 3s3
+ 9s2
+ 12s + K
11. Determinar al función de transferencia total del siguiente diagrama de bloques
R(s) + +
+ C(S)
_ _
12. Estudiar la estabilidad del sistema en lazo abierto y en lazo cerrado.
R(s) + + C (s)
- -
13. Obtener la función de transferencia del siguiente circuito.
14. Explicar cómo funciona un tostador de pan desde el punto de vista de su sistema de control, y
dibujar su diagrama de bloques.
15. Identificar cada uno de los distintos elementos que constituyen un sistema de control en bucle
cerrado, que forman el sistema físico que resulta cuando una persona trata de coger un objeto.
Dibujar el diagrama de bloques correspondiente. Identifica cada uno de los bloques del sistema y
explicar los elementos que lo constituyen.
G1 G2
G3
H1
10 + 4s
2
s2
+ s + 1
1
s2
+ 3
Us
Ue
C
R
6. 6 Actividades UD 7. Sistemas de control automático Tecnología Industrial II