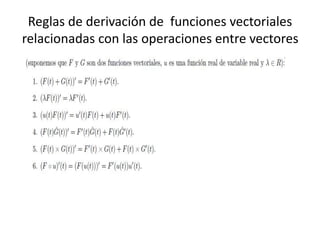
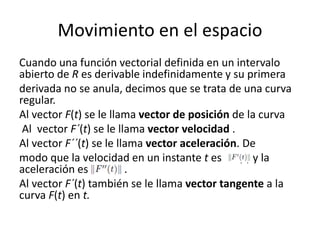
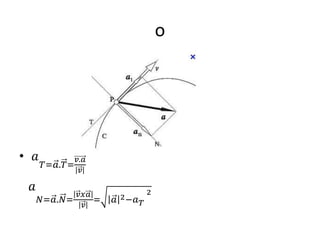
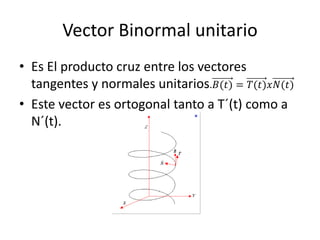
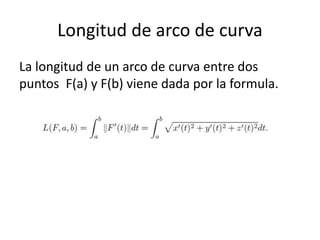
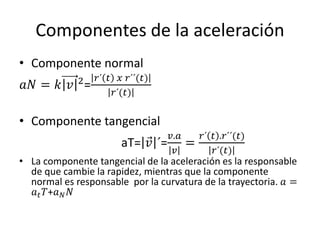
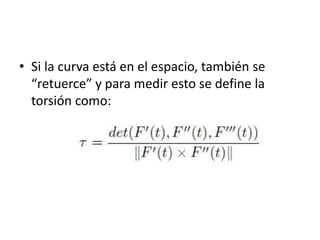
Este documento describe funciones vectoriales y sus aplicaciones en el movimiento en el espacio. Explica que una función vectorial mapea números reales a vectores y cómo calcular la derivada e integral de tales funciones. También cubre conceptos como la velocidad, aceleración y curvatura de curvas paramétricas definidas por funciones vectoriales, y cómo descomponer la aceleración en componentes tangenciales y normales. Incluye ejemplos numéricos para ilustrar estos conceptos.