Descargado 51 veces
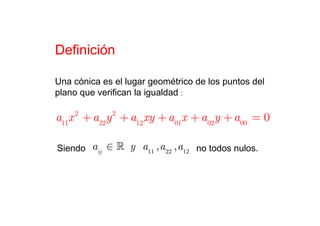







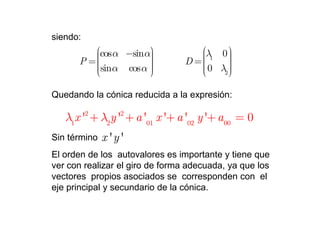











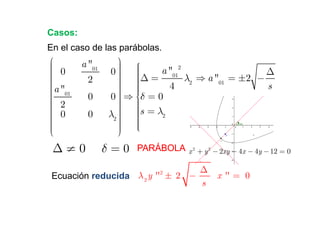






La cónica es el lugar geométrico de puntos que cumplen una ecuación de segundo grado. Puede representarse mediante una matriz asociada a su parte cuadrática, la cual puede diagonalizarse para obtener los ejes principales de la cónica. Existen diferentes tipos de cónicas como elipses, hipérbolas y rectas dependiendo de los signos de los autovalores y el término independiente.



















































































